第61期“见微知著”培训课程:惯性传感器及应用
2024-04-26 16:29:43 来源:麦姆斯咨询 评论:0 点击:
惯性传感器是一类基于惯性及相关测量原理将物体运动量转换成电信号的装置,包括加速度计、陀螺仪及其组合式传感器。MEMS技术引领惯性传感器进入“小尺寸、低成本、高集成度、多功能、智能化”的新时代。
主办单位:麦姆斯咨询、国家物联网感知装备产业计量测试中心
协办单位:上海传感信息科技有限公司
一、课程简介
惯性传感器是一类基于惯性及相关测量原理将物体运动量转换成电信号的装置,包括加速度计、陀螺仪及其组合式传感器,主要用于检测平动、转动、振动、冲击、倾斜,是解决导航、定向和运动载体控制的重要部件。惯性传感技术多种多样,以陀螺仪为例,包括机械陀螺仪、环形激光陀螺仪(RLG)、光纤陀螺仪(FOG)、半球谐振陀螺仪(HRG)、MEMS陀螺仪、硅光子光学陀螺仪(SiPhOG)、量子陀螺仪等。其中,MEMS技术引领惯性传感器进入“小尺寸、低成本、高集成度、多功能、智能化”的新时代。如今,MEMS惯性传感器无处不在:从“智能手机和平板电脑”到“可穿戴设备和体感游戏机”,从“工业控制和振动监测”到“无人机和汽车”,从“航空航天”到“国防军工”……
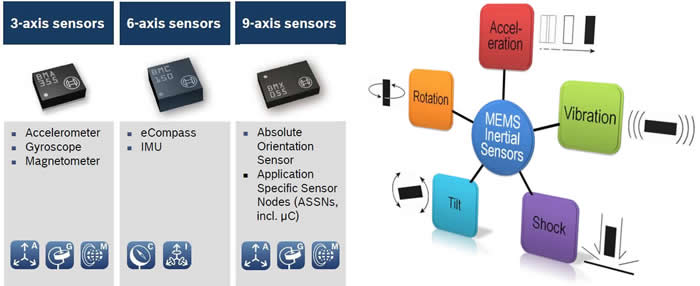
左:MEMS惯性传感器产品示例(博世);右:MEMS惯性传感器主要用于检测五类运动
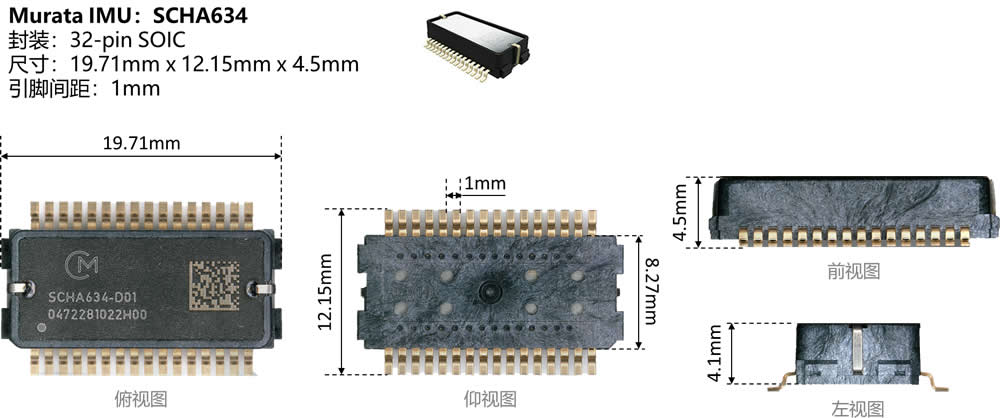
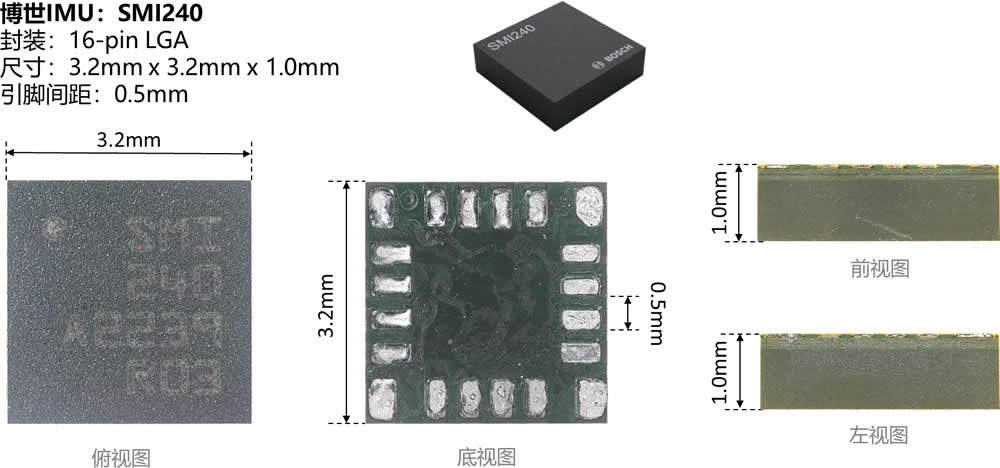
目前,分立式MEMS惯性传感器市场趋于饱和、价格不断侵蚀,而组合式MEMS惯性传感器市场蓬勃发展,预计2028年市场规模将接近30亿美元。博世(Bosch)、意法半导体(STMicroelectronics)、TDK InvenSense持续引领6轴MEMS惯性测量单元(IMU)发展,三家领先厂商合计占据超过70%的市场份额。在消费领域,以可穿戴设备为代表的新兴应用持续涌现,例如TWS耳机利用6轴IMU检测头部方向以提供个性化的3D音频效果;苹果首款头戴式空间计算设备Vision Pro集成4颗6轴IMU以准确感知用户的运动与方位信息,从而实现沉浸式视听体验与人机交互。在汽车领域,车载导航系统逐渐成为自动驾驶汽车的标配,车规级6轴IMU出货量与日俱增,村田(Murata)和博世在该领域处于主导地位,同时众多中国MEMS厂商投入研发力量并研发替代产品。
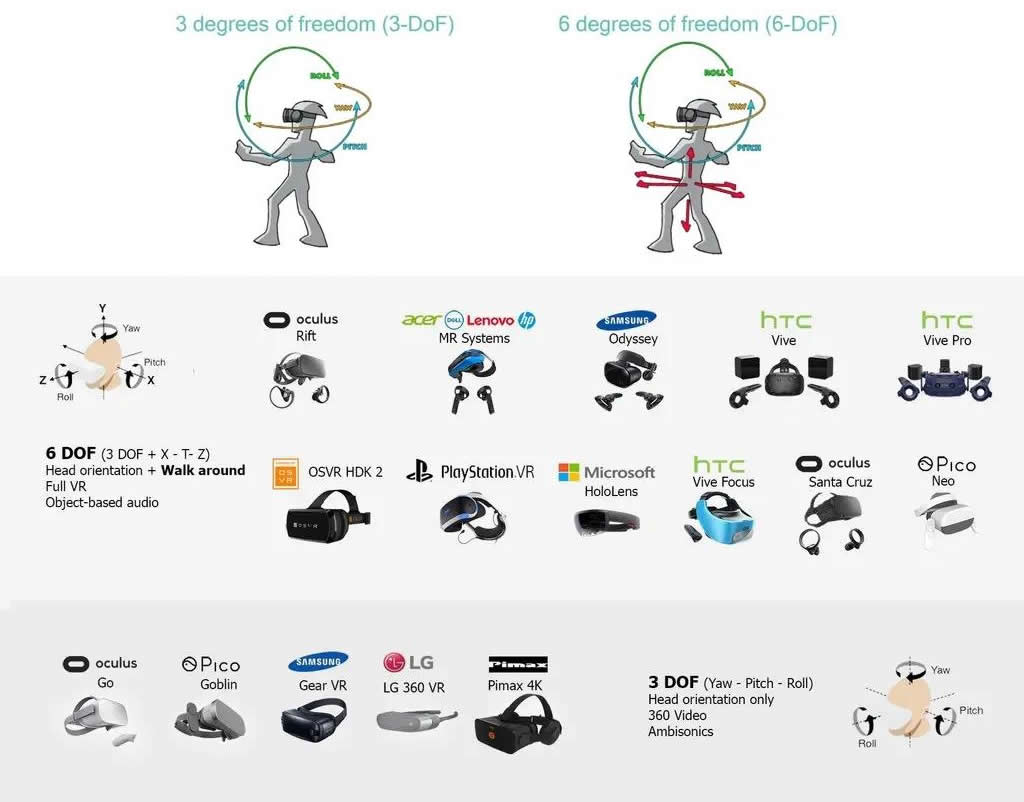
典型的头戴式空间计算设备(包括VR、AR、MR)的感知自由度
在工业领域,随着“工业4.0”的推进和预测性维护的重视,基于加速度计的在线振动监测技术在各种工业场合被广泛使用,从而有效降低设备维护成本。此外,惯性传感器是自主导航机器人的核心传感器之一,从四足机器人到人形机器人皆有IMU的身影,例如波士顿动力(Boston Dynamics)的人形机器人Atlas通过6轴IMU、力传感器等来实现姿态控制,再结合视觉传感器感知周围环境中的障碍物,最终实现导航定位并执行任务。在医疗领域,机器人手术导航技术依赖于多种类型的传感器,视觉传感器与惯性传感器的结合,不仅能提供冗余数据以提高可靠性,而且还可提升手术设备在不同条件和动态条件下的定位精度。此外,惯性传感器还可用于助听器、心脏起搏器、自动体外除颤仪等医疗设备。
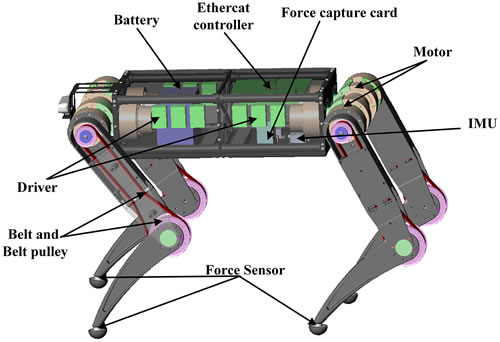
集成6轴IMU和力传感器的四足机器人
在航空航天和国防军工领域,以SpaceX可回收火箭为代表的商业太空应用、以俄乌和巴以战争为契机的军事现代化,以及国防“定位、导航和授时(PNT)”等需求推动高端惯性传感器市场发展,市场份额集中于三大知名巨头:霍尼韦尔(Honeywell)、诺斯洛普·格鲁曼(Northrop Grumman)和赛峰(Safran)。许多较小的厂商专注于特定的技术、市场和应用,难以与巨头正面交锋。尽管竞争格局多年来一直保持稳定,但在过去数年中的投资和并购速度加快,例如:赛峰(Safran)于2021年收购MEMS惯性传感器厂商Sensonor,并于2022年将Colibrys与Sensonor合并为赛峰传感(Safran Sensing);ECA集团于2022年收购高端惯性传感器制造商iXblue,双方合并为ECA-iXblue集团。此外,以Anello、OSCP为代表的初创公司正在募集资金以开发基于硅光集成技术的光学陀螺仪;博世旗下的初创公司Bosch Quantum Sensing正在商业化基于金刚石中氮-空位(NV)中心的量子陀螺仪。
惯性传感器的价值正转向数据融合及智能感知,因为市场竞争不仅仅是性能,还需要考虑功能/应用需求,所以惯性传感器厂商需要利用软件解决方案,以提高产品的附加值。组合式惯性传感器通常嵌入各种算法和软件,以惯性测量单元(IMU)、垂直参考单元(VRU)、姿态和航向参考系统(AHRS)、惯性导航系统(INS)等形式出现。当前,以意法半导体和博世为代表的MEMS龙头厂商不断地推动智能感知技术的发展,人工智能(AI)与惯性传感器的结合愈发深入边缘端:从“On the Edge”到“In the Edge”。基于AI的智能惯性传感器通过提升产品性能,减少数据传输,从而加快本地决策速度和降低系统功耗,并通过将数据保持在本地增强隐私安全。
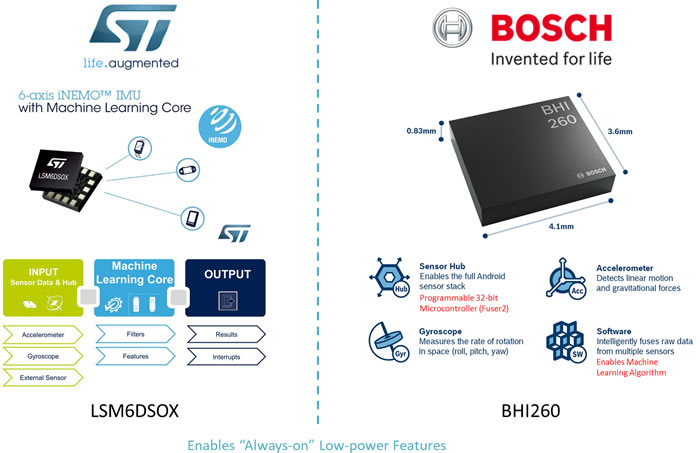
意法半导体和博世的新战略:惯性传感器+人工智能⇒智能惯性传感器
为了把握惯性传感器产业及技术趋势,满足广大从业人员对知识的渴求,麦姆斯咨询特开设本次培训课程,邀请著名高校与研究院所的专家和学者,为大家讲授:(1)高灵敏度低噪声MEMS加速度计;(2)MEMS谐振式加速度计及倾角传感器;(3)新型“零刚度”MEMS加速度计关键技术;(4)抗高过载MEMS陀螺仪芯片;(5)车载MEMS振动陀螺仪设计;(6)多环谐振式MEMS陀螺仪及应用;(7)高精度固体波动(环形)MEMS陀螺仪;(8)MEMS寻北陀螺仪技术及应用;(9)单芯片三轴一体MEMS陀螺仪敏感元件及系统;(10)MEMS频率调制陀螺仪及复合惯性传感器;(11)MEMS惯性传感系统设计及应用;(12)惯性传感器实验室参观学习。
二、培训对象
本课程主要面向惯性传感器产业链上下游企业的技术人员和管理人员,以及高校师生,同时也欢迎其他希望了解惯性传感器及应用的非技术背景人员参加,如销售和市场人员、投融资机构人员、政府管理人员等。
三、培训时间
2024年5月24日~5月26日
授课结束后,为学员颁发麦姆斯咨询的结业证书。
四、培训地点
无锡市(具体地点以培训前一周的邮件通知为准)
五、课程内容
课程一:高灵敏度低噪声MEMS加速度计
老师:英国约克大学 助理教授 赵纯
MEMS加速度计经过近四十多年的发展,是目前产业化最为成功、应用最为广泛的MEMS器件之一。MEMS加速度计由于尺寸小、重量轻、功耗低、可批量生产等优点,广泛应用于消费电子、汽车电子、工业控制、航空航天、军事国防等领域。常见的MEMS加速度计类型有压阻式、电容式、压电式、谐振式等。其中,电容式和谐振式在高精度惯性应用领域具有巨大的发展潜力。高灵敏度低噪声MEMS加速度敏感元件和低噪声接口电路是实现高精度加速度计的必要条件。优化加速度敏感元件结构、实施温度和应力补偿、改进器件封装(例如低应力封装、晶圆级真空封装)等是提升MEMS加速度计性能和长期稳定性的主要方式。本课程阐述高灵敏度低噪声MEMS加速度计发展历程,并以电容式和谐振式两类为例讲解MEMS加速度计设计与制造,同时辅以接口电路设计知识。
课程提纲:
1. MEMS加速度计分类及对比;
2. 高灵敏度低噪声MEMS加速度计发展历程;
3. 电容式高灵敏度低噪声MEMS加速度计设计及制造;
4. 谐振式高灵敏度低噪声MEMS加速度计设计及制造;
5. 高灵敏度低噪声MEMS加速度计接口电路设计;
6. 高灵敏度低噪声MEMS加速度计未来趋势。
课程二:MEMS谐振式加速度计及倾角传感器
老师:中国科学院空天信息创新研究院 研究员 邹旭东
谐振式加速度计将待测的加速度信号转化为频率信号,通过检测谐振器谐振频率变化来反推外界加速度的大小和方向。谐振式加速度计采用频率调制检测机制,对低频噪声不敏感,抗干扰能力强,频率测量精度高。按照器件的材料特性,谐振式加速度计主要分成硅谐振式和石英谐振式两大类。与传统的石英谐振式加速度计相比,采用MEMS技术的硅谐振式加速度计具有以下优点:(1)单晶硅的杂质浓度极低,是一种比较理想的弹性结构材料;(2)MEMS工艺能够制造尺寸非常小的谐振器结构,可以有效地隔离其它器件产生的应力;(3)基于电容结构的谐振器的驱动和检测在设计上要比压电石英技术更加灵活。国内科研机构对于硅谐振式加速度计的研究进展迅速,目前正在向产业化阶段迈进,主要有清华大学、南京理工大学、华中科技大学、浙江大学、中国科学院等。本课程详解MEMS谐振式加速度计核心技术,从设计与制造到测试与校准,并传授MEMS谐振式倾角传感器知识。
课程提纲:
1. 高精度MEMS惯性传感器概述;
2. MEMS谐振式加速度计设计;
3. MEMS谐振式加速度计制造;
4. MEMS谐振式加速度计测试与校准;
5. MEMS谐振式倾角传感器;
6. MEMS谐振式加速度计总结与展望。
课程三:新型“零刚度”MEMS加速度计关键技术
老师:浙江大学 副教授 马志鹏
MEMS加速度计是各种高科技应用的关键器件,不过面临着温度引起的精度漂移的挑战。传统的解决方案包括设计对温度不敏感的结构和改进制造工艺等,但这些解决方案的效果有限。浙江大学马志鹏等人提出了一种新型静电修调“零刚度”MEMS加速度计,在精度和温度稳定性方面实现了显著的改进,研制的最新样机关键指标(带宽超50 Hz、零偏不稳定性800 ng、温漂系数7 μg/℃)达到了国际一流水平。这项创新技术不仅解决了温度漂移的长期挑战,还为MEMS加速度计在太空探索和环境监测等关键领域的应用铺平了道路,有望彻底改变高精度测量和控制系统。本课程首先针对静电修调MEMS加速度计进行技术探索与详细分析,包括MEMS芯片设计与制造、ASIC芯片设计、动力学与噪声建模等,然后针对“零刚度”MEMS加速度计进行控制系统优化与分析、噪声/温漂抑制等。
课程提纲:
1. 惯性传感器技术最新发展动态与挑战;
2. MEMS加速度计的静电刚度修调技术探索;
3. 静电修调MEMS加速度计设计、制造与电路;
4. 静电修调MEMS加速度计动力学与噪声建模;
5. “零刚度”MEMS加速度计控制系统优化与分析;
6. “零刚度”MEMS加速度计噪声/温漂抑制技术研究;
7. “零刚度”MEMS加速度计技术总结与展望。
课程四:抗高过载MEMS陀螺仪芯片
老师:中北大学 教授 曹慧亮
随着加工工艺和测控技术的不断改进,MEMS陀螺仪的精度和成品率显著提升,相比于其它形式的陀螺仪,MEMS陀螺仪还具有体积小、功耗低、重量轻、成本低的优点,特别是优异的抗冲击特性,使其在火箭发射监测、弹药惯性制导等方面具备了强大优势。在精确制导武器中,MEMS陀螺仪在经历高过载环境如何保持存活以及正常工作是各国军用高性能微型惯性传感器的研究重点。目前,国内外应用在高过载环境中的MEMS陀螺仪主要分为线振动、固体波动两大类。美国霍尼韦尔(Honeywell)研制的线振动MEMS陀螺仪能够在冲击幅值达到20000 g的过载环境下存活;英国BAE研制的电磁驱动检测的固体波动MEMS陀螺仪也能耐受20000 g过载冲击。本课程详解抗高过载MEMS陀螺仪关键技术及发展趋势,从芯片设计及制造到器件封装及测试。
课程提纲:
1. 抗高过载MEMS陀螺仪技术发展趋势;
2. 抗高过载MEMS陀螺仪芯片设计及制造;
3. 抗高过载MEMS陀螺仪芯片测控系统;
4. 抗高过载MEMS陀螺仪封装及防护技术;
5. MEMS惯性传感器抗冲击测试技术;
6. 抗高过载MEMS陀螺仪总结与展望。
课程五:车载MEMS振动陀螺仪设计
老师:大连理工大学 教授 赵剑
车辆运动角速度的测量,不仅对提高汽车主动安全、智能控制与舒适性具有意义,也是自动驾驶汽车必不可少的参数。陀螺仪是一种测量载体角速度或角度的惯性器件,在汽车电子系统中被用来测量俯仰(Pitch)、侧倾(Roll)、横摆(Yaw)角速度。MEMS振动陀螺仪因其体积小、功耗低、价格低、易于集成等特点在汽车领域获得广泛应用,例如防抱死系统(ABS)、电子稳定控制系统(ESC)、斜坡起动辅助系统(HAS)、侧翻稳定控制系统(RSC)、自适应巡航系统(ACC)、安全气囊系统及导航定位系统等。目前,成熟的商用车载MEMS陀螺仪主要被国外垄断,生产厂家主要有博世(Bosch)、村田(Murata)、TDK InvenSense、亚德诺半导体(Analog Devices)、Silicon Sensing、意法半导体(ST)等。本课程从车载惯性传感器需求出发,深入讲解MEMS振动陀螺仪研究进展、动态特性分析、设计与仿真等内容。
课程提纲:
1. 车载MEMS惯性传感器需求分析;
2. MEMS振动陀螺仪概述与进展;
3. 车载MEMS振动陀螺仪动态特性分析;
4. 车载MEMS振动陀螺仪设计与仿真;
5. 车载MEMS振动陀螺仪总结与展望。
课程六:多环谐振式MEMS陀螺仪及应用
老师:西北工业大学 教授 谢建兵
MEMS多环谐振式陀螺仪是一种基于科里奥利效应的固体波动陀螺仪,与线振动MEMS陀螺相比,其具有全对称结构、高品质因数、较好的抗振动性能、低锚定损耗等优点。2003年,美国喷气推进实验室(JPL)和波音(Boeing)在单环谐振式陀螺仪的基础上提出了多环结构的MEMS碟形陀螺仪方案,即多环谐振式陀螺仪。同年,美国斯坦福大学采用Epi-Seal工艺研制出一种晶圆级封装多环谐振式MEMS陀螺仪,其环形直径范围在0.5 mm至2 mm之间,实现了陀螺仪的小型化。由于多环谐振式MEMS陀螺仪体现出导航级的性能潜力,国内很多高等院校和研究院所开展了深入研究工作,代表性单位有上海交通大学、西北工业大学、南京理工大学、东南大学、国防科技大学、苏州大学以及中北大学。目前,设计高性能多环谐振式MEMS陀螺仪的思路主要分为两种:(1)不改变陀螺仪拓扑结构,仅改变其结构参数,实现性能的提高;(2)改进陀螺仪拓扑结构使其达到更高的性能。本课程从高精度MEMS陀螺仪入手,讲解多环谐振式MEMS陀螺仪工作原理、设计与制造,以及融合智能算法的优化技术。
课程提纲:
1. 高精度MEMS陀螺仪的发展历程;
2. 多环谐振式MEMS陀螺仪高精度实现原理;
3. 多环谐振式MEMS陀螺仪结构拓扑设计与制造工艺;
4. 融合智能算法的多环谐振式MEMS陀螺仪参数优化;
5. 高精度MEMS陀螺仪典型应用及面临的挑战。
课程七:高精度固体波动(环形)MEMS陀螺仪
老师:南京理工大学 副教授 姜波
军用高精度MEMS陀螺仪技术路线与民用MEMS陀螺仪技术路线完全不同,基本都是采用环境适应性好的全对称结构:固体波动陀螺仪方案,主要包括微半球、环形两大类。美国国防高级研究计划局(DARPA)的Micro-PNT项目重点支持多环谐振盘陀螺仪(DRG)和微半球陀螺仪(VRG)的研制,取得很好的研究成果。2015年,DARPA启动的先进惯性微型传感器(AIMS)项目,强调只支持结构上全对称的二维或三维的CVG-II型陀螺仪研制。发达国家始终未停止对高性能环形全对称结构MEMS惯性传感器的研制步伐,已在实战中经过检验,实现了以全对称环形固体波动陀螺仪的“中高精度、低成本、高可靠、大批量、中端军用”应用设想。本课程全面介绍高精度环形MEMS陀螺仪知识,并对研究现状、发展趋势及典型应用进行解读。
课程提纲:
1. 高精度固体波动MEMS陀螺仪分类与对比;
2. 高精度环形MEMS陀螺仪谐振结构发展历程;
3. 高精度环形MEMS陀螺仪谐振结构工作原理与特点;
4. 高精度环形MEMS陀螺仪学术前沿与国内外研究现状;
5. 高精度环形MEMS陀螺仪发展趋势;
6. 高精度环形MEMS陀螺仪典型应用。
课程八:MEMS寻北陀螺仪技术及应用
老师:南京理工大学 副研究员 赵阳
寻北定向是惯性技术应用中的“皇冠”,是确保现代导航系统快速、精确定向的关键技术。基于陀螺仪的寻北仪(简称:螺仪寻北仪)是一种测量地球自转角速率在当地水平面投影方向(即真北方位)的惯性测量系统,其寻北过程无需外部参考。除受高纬度限制之外,螺仪寻北仪不受天气、昼夜时间、地磁场和场地通视条件的影响,可用于为动力运载工具、火炮、导弹和地面雷达等机动系统提供方位参考信息。寻北仪对陀螺仪性能的要求高——达到中高端导航级,现有的MEMS技术实现难度大,必须辅助转台进行多位置测量抵消漂移误差,但这种方式不符合MEMS技术C-SWaP特征。本课程从捷联式寻北定向原理出发,阐述寻北精度和测量时间对陀螺仪的指标要求,并讲解MEMS寻北陀螺仪关键技术及应用。
课程提纲:
1. MEMS寻北陀螺仪机遇与挑战;
2. 主流厂商MEMS寻北陀螺仪解析;
3. 0.01°/h零偏不稳定性实现途径与制约机制;
4. 陀螺仪晶圆级多参数表征与预测技术;
5. MEMS寻北陀螺仪应用优化技术。
课程九:单芯片三轴一体MEMS陀螺仪敏感元件及系统
老师:中国科学院上海微系统与信息技术研究所 博士 陈方
多轴MEMS惯性传感器的发展经历了从“器件组装”到“芯片组合”,再到“单芯片集成”的三个阶段,在微型化、成品率和规模制造成本等方面不断优化发展。博世、意法半导体、TDK InvenSense是多轴MEMS惯性技术的重要推动者,不仅将三轴MEMS加速度计和三轴MEMS陀螺仪融入广泛的消费电子产品中,还实现了单芯片六轴一体MEMS惯性传感器。中科院上海微系统所独创的“微创手术(MIS)”工艺可以实现单芯片集成多轴于一体,并与我国现有IC工艺相兼容。“微创手术(MIS)”与博世APS工艺和意法半导体VENSENS工艺同为相互竞争的第三代单芯片MEMS工艺,在微型化、高成品率和低成本规模制造方面具有较大优势。本课程重点剖析单芯片三轴一体MEMS陀螺仪敏感元件及测控电路,并讲解新型闭环模态局域放大的灵敏度增强机制,最后对单芯片三轴一体MEMS陀螺仪进行技术总结与展望。
课程提纲:
1. 工业级单芯片三轴一体MEMS陀螺仪研究概述及最新进展;
2. 典型单芯片三轴一体MEMS陀螺仪设计分析及制造工艺;
3. 误差自校准的陀螺仪Sigma-delta测控电路设计与多回路集成;
4. 新型闭环模态局域放大的灵敏度增强机制及其陀螺仪设计;
5. 工业级单芯片高频响三轴一体MEMS陀螺仪敏感元件研究;
6. 单芯片三轴一体MEMS陀螺仪总结与展望。
课程十:MEMS频率调制陀螺仪及复合惯性传感器
老师:上海大学 副教授 陈建霖
MEMS陀螺仪主要基于两种控制方法运作:幅度调制(AM)和频率调制(FM)。在商用领域,绝大多数MEMS陀螺仪采用幅度调制控制方式,该方式通过测量与驱动方向垂直方向上可移动质量块的位移幅度来计算角速度。然而,基于幅度调制的MEMS陀螺仪面临诸如温度稳定性较低以及带宽和灵敏度之间需要权衡的问题,这些问题限制了其性能。虽然采用复杂的补偿技术能够使其达到导航级性能,但这样做不可避免地会增加生产成本。相比之下,基于频率调制的MEMS陀螺仪近年来受到越来越多的关注,因为它们提供更高的稳定性,以及较小的温度/应力漂移和长期稳定性。频率调制模式被视为高性能商用陀螺仪的更佳选择。本课程将深入讲解MEMS频率调制陀螺仪的工作原理、设计、制造过程及测试校准方法,并在课程的最后部分介绍加速度计与陀螺仪复合的MEMS频率调制惯性传感器。
课程提纲:
1. MEMS频率调制/全角陀螺仪概述;
2. 高对称性Z轴MEMS频率调制陀螺仪设计;
3. 高对称性X/Y轴MEMS频率调制陀螺仪设计;
4. MEMS频率调制陀螺仪的制造工艺与测试校准;
5. MEMS加速度/角速度频率调制复合惯性传感器研究。
课程十一:MEMS惯性传感系统设计及应用
老师:北京大学 教授/无锡北微传感科技有限公司 CTO 时广轶
在各类导航应用中,为了提高精确制导、导航和定位等功能,多传感融合是必要手段,通过集成惯性传感系统可有效提高导航的可靠性与稳定性。北微传感采用三维集成技术构建具有特种传感功能的集成惯性微系统(例如北斗+惯性七轴微系统),并利用多传感融合技术提高灵敏度,借助系统级多物理场仿真进行设计优化,通过补偿与自校准方法提高系统可靠性与稳定性,其惯性产品应用覆盖自动驾驶、工程机械、结构监测、机器人等众多领域。北微传感面向三维集成关键技术开展了攻关研究,掌握了硅通孔(TSV)各项关键技术,形成TSV成套工艺,并实现TSV集成建模与测试。此外,北微传感还掌握了先进的自校准技术,解决了包括零漂和温漂等影响MEMS惯性传感器长期稳定性的难题。在本课程中,北微传感CTO时广轶老师结合科研与产业两方面的经验,详解MEMS惯性传感系统设计要点及典型应用。
课程提纲:
1. 惯性器件的分类,车辆导航对惯性芯片的最低要求?
2. 组合导航是否要做成芯片,芯片与PCB板级的权衡?
3. 惯性导航的发展趋势,研究的边界如何界定?
4. MEMS惯性传感微系统标定技术(自标定)及其重要性;
5. MEMS惯性传感微系统的应用领域;
6. 前期测试成果及北微传感的核心技术点;
7. MEMS向NEMS发展的技术预测。
课程十二:惯性传感器实验室参观学习
老师:国家物联网感知装备产业计量测试中心 惯性传感器实验室项目主管 陈君
国家物联网感知装备产业计量测试中心以产业需求为导向,以计量测试技术和计量科技创新为主要手段,研究具有物联网产业特点的量值传递技术,开展产业关键领域关键参数的计量测试服务。该中心具有国内一流的软硬件设施和先进的检测仪器,目前在惯性、压力、风速、振动等领域的计量测试服务能力在国内处于领先地位,并可提供各类环境可靠性试验和机械可靠性试验。该中心的惯性传感器实验室拥有高精度三轴温控转台、三轴仿真转台、高精度离心试验机(线加速度台)、角振动转台、振动绝对法标准装置、比较法冲击标准装置、低频校准系统等,可以对加速度计、陀螺仪、倾角传感器、惯性测量单元(IMU)等进行检验检测。本课程带领学员们了解惯性传感器测试方法及设备,结合现场参观实验室加深体会。
课程提纲:
1. 国家物联网感知装备产业计量测试中心简介;
2. 计量与产业计量;
3. 惯性传感器涉及的标准、规程和规范;
4. 惯性传感器测试服务能力;
5. 惯性传感器测试服务的典型案例;
6. 参观惯性传感器实验室。
六、师资介绍
赵纯,博士,英国约克大学(罗素集团大学成员,英国高校学术研究排名REF前十)助理教授。他分别于华中科技大学、英国帝国理工学院、英国南安普顿大学取得工学学士、理学硕士和博士学位。完成博士研究后,他先后历任欧洲夏普研究实验室(Sharp Laboratories of Europe,Oxford)研究科学家、英国剑桥大学博士后、华中科技大学副研究员。目前,他还兼任IEEE Sensors Journal杂志副主编,以及IEEE MEMS(2024)、Eurosensors(2021-2023)会议的Technical Program Committee(TPC)成员等。研究兴趣主要集中在MEMS传感器(包括惯性器件等)和能量收集器领域,以及MEMS/NEMS器件设计和理论,尤其是微纳谐振器的非线性动力学及模态耦合研究。截至2024年4月,研究成果发表在Nature Communications、Physical Review Applied、IEEE JMEMS等领域内知名期刊,以及IEEE MEMS、Transducers等国际会议上,并被引用超过2200次(Google Scholar)。
邹旭东,博士,中国科学院空天信息创新研究院“传感器技术重点实验室”课题组长、研究员、博士生导师,中国科学院大学电子电气与通讯工程学院岗位教授、博士生导师,中国科学技术大学国家示范性微电子学院兼职博士生导师,中国电子学会“传感与微系统”分会青年副主任委员,中国微米纳米技术学会国际合作交流委员会副主任委员,国家高层次人才项目入选者。本科毕业于北京大学元培计划实验班,获得微电子专业理学学士学位,研究生毕业于剑桥大学工程系,获得微系统专业博士学位。他曾在剑桥大学纳米科学中心从事研究工作并当选剑桥大学丘吉尔学院Research Fellow,2016年全职加入中国科学院电子学研究所,任研究员。他长期从事微机电系统(MEMS)、微机械谐振器、高精度微惯性传感器、多功能集成微系统、定位-导航-授时(PNT)微系统以及微纳加工技术开发等研究工作。自2014年至今,他主持或共同主持Innovate UK、UK NERC以及国家自然科学基金、国家重点研发计划、国防科技创新特区、中科院“从0到1”原始创新项目、仪器研制项目、重点部署项目等科研项目10余项。研究成果在MEMS以及传感器、机器人与人工智能领域内著名期刊及国际会议上共发表论文70余篇,多次获得会议优秀论文奖,合著英文专著1部、合作翻译专著1部;申请发明专利40余项,其中国际发明专利6项,授权专利20项。他长期担任中国科学院大学研究生专业核心课《微机电系统基础》首席教授,曾获中国发明协会发明创新奖、国家优秀自费留学生奖、中国电子教育学会优秀博士生论文指导教师、中国科学院大学教学基本功大赛二等奖等荣誉。
马志鹏,博士,浙江大学航空航天学院副教授、博士生导师,博士毕业于日本京都大学微细工程系,担任过日本京都大学工学院Program Specific Assistant Professor,自2018年开始在浙江大学航空航天学院微小卫星研究中心任教。他长期从事MEMS、惯性传感和智能化系统研究工作,发表论文20余篇、授权专利5项;主持国家自然科学基金2项、浙江省自然科学基金、横向等多项课题;担任IEEE Inertial 2024 TPC联席主席、中国微米纳米技术学会/中国仪器仪表学会/中国宇航学会高级会员、全国研究生教育评估监测专家库专家、浙江大学航空航天学院国际化工作委员会委员;兼任IEEE Sensors Letters副主编以及Journal of Micromechanics and Microengineering、Microsystems & Nanoengineering、IEEE Transactions on Automation Science and Engineering、Precision Engineering、Measurement Science and Technology等10余个国内外学术期刊审稿人。
曹慧亮,博士,中北大学仪器与电子学院教授、博士生导师,东南大学和美国佐治亚理工学院联合培养博士,国家二级创业咨询师。山西省高等学校青年学术带头人、三晋英才、山西省人社厅留学回国人员科技活动择优资助项目获得者、IEEE Senior Member、中国微米纳米学会高级会员、中国自动化学会高级会员、中国计算机学会会员、中国航空学会会员、ICAN中国联盟常务理事(山西赛区)。他主要从事MEMS惯性器件设计加工、测控及数据处理等方面的工作,以第一(通讯)作者发表SCI论文40余篇,被引用1000余次,ESI高被引论文5篇,授权发明专利40余项,出版专著3部。近年来,他作为项目负责人主持国家重点研发计划(课题)1项,国家自然基金重点联合项目(分承研)1项,ZF重点项目2项,JKW基金项目2项,国家自然科学基金1项,兵器联合基金、航空基金、山西省基金等省部级项目10余项,作为骨干参与国家级省部级课题多项获2023年仪器仪表学会科技进步二等奖。他还是《导航与控制》、《中北大学学报(自然科学版)》、《导航定位与授时》期刊(青年)编委。在教学方面,他主讲《单片机原理及应用》和《微惯性器件》课程,出版教材1部,是“山西省优秀创新创业导师”,主持校级教改项目3项,指导学生参加各类创新大赛获奖40余项,获得2019年度山西省教学成果奖二等奖。
赵剑,博士,大连理工大学机械学院教授、博士生导师,现任科研院先进院院长,曾任汽车工程学院院长。他主要从事智能车辆、传感器、智能网联与安全等领域的研究,获评星海学者-星海优青、大连市首批青年科技之星,担任中国汽车工程学会理事、奖励工作委员会委员、中国微纳米学会微纳执行器与微系统分会理事、中国微纳米学会青年工作委员会委员、ASME微纳系统技术委员会委员、国家音视频标准委员会委员,负责和参与起草汽车视频记录仪技术规范行业标准6项,承担国家自然科学基金、国家重点研发计划子课题、重点专项、工业互联网创新发展工程、欧盟地平线计划5G-MOBIX等20余项,发表期刊论文100余篇,包括JAP、IEEE TIE、IEEE/ASME TM、SENSOR ACTUAT A/B、IEEE TIM、IEEE S、ASME JMR、MMT等知名期刊,主编十二五规划教材1部,授权发明专利23项,技术转化2项,曾获中国电子学会自然科学二等奖、中国智能交通学会科技进步二等奖、中物院优秀成果二等奖、ASME IDETC MNS最佳论文奖、ASME IDETC非线性动力学分会最佳组织奖、仪器仪表学报年度优秀论文奖、辽宁省自然科学学术成果一等奖2次、大连市自然科学优秀学术论文特等奖。
谢建兵,博士,西北工业大学机电学院教授、博士生导师,全国微机电技术标准化技术委员会(SAC/TC336)委员、中国微米纳米技术学会微纳传感技术分会理事、中国仪器仪表学会量子传感与精密测量仪器分会理事。他的主要研究方向为MEMS惯性传感器及MEMS制造技术,主持国家自然科学基金项目3项、科技委领域基金1项、国家863计划项目2项、国家重点研发计划子课题1项、华为联合项目1项、西安市科技计划项目1项;发表SCI/EI论文20余篇,出版专著及教材5部;申请国家发明专利43项,其中已授权22项;制定国家标准1部;获国家技术发明奖二等奖1项、陕西省科学技术一等奖2项、中国机械工业科学技术一等奖1项、教育部技术发明奖二等奖1项;获得陕西省“三秦人才津贴”。
姜波,博士,南京理工大学机械工程学院副教授、硕士生导师,仪器仪表学会微纳器件与系统技术分会理事,《中国惯性技术学报》、《飞控与探测》期刊青年编委。他长期从事MEMS技术、MEMS陀螺仪结构设计等工作,并取得了相关成果。目前,他主持国家自然科学基金面上项目、青年项目,江苏省自然科学基金青年项目、重大基础研究项目课题、科工局稳定支持项目开放基金等省部级及以上项目6项,参与其他省部级及以上课题多项,主要负责高精度MEMS陀螺仪新结构、新原理的研究。他以第一作者或通讯作者在TED、APL、J. MEMS、SENSOR ACTUAT A-PHYS等期刊上发表多篇论文,授权国家发明专利5项。他在MEMS固体波动(环形)陀螺仪领域具有较为丰富的研究经验,设计了多款MEMS固体波动(环形)陀螺仪。
赵阳,博士,南京理工大学副研究员,自2011年起开始从事MEMS惯性技术研究,主要研究方向包括MEMS惯性传感器高精度ASIC测控技术、MEMS陀螺仪在线自补偿与自校准技术。他主持国防973子专题、国家青年自然科学基金、装备预研领域基金等多项重点科研项目,以第一作者身份发表SCI/EI论文30余篇,并于2015年和2018年先后在国际集成电路领域顶级期刊IEEE JSSC上发表国内首篇关于MEMS加速度计与陀螺仪的文章,授权发明专利10余项。
陈方,博士,中科院上海微系统与信息技术研究所传感技术国家重点实验室研究生导师、上海市惯性技术协会理事。他在西北工业大学取得工学学士、硕士和博士学位,曾在英国南安普顿大学Prof. Michael Kraft团队进行联合培养,并获得美国加州大学Irvine分校Prof. Andrei Shkel小组博士后职位,于2014年加入中国科学院上海微系统与信息技术研究所。多年来一直从事微纳惯性传感器领域的相关研究工作,在MEMS惯性传感器设计、低噪声接口电路、模拟/数字力平衡闭环测控技术等方面取得创新性成果。他主持MEMS陀螺仪方面的国家重点研发计划课题项目、国家自然科学基金面上项目、青年项目、上海市智能传感创新重大专项和上海市自然科学基金等研究项目,以第一作者身份在IEEE MEMS、IEEE Transducers和IEEE Sensors上先后发表惯性技术论文10余篇,并受邀在IEEE MEMS 2024、2021和IEEE Sensors等国际会议上进行MEMS陀螺仪研究口头报告;在本领域权威期刊Microsystems & Nanoengineering、Sensors & Actuators A: Physical、IEEE J. MEMS、IEEE Sensors J.、JMM上发表惯性技术论文10余篇,受邀在IEEE Sensors J.、Sensors上分别发表综述论文,并受邀合作撰写专著《中国电子信息工程领域发展研究-传感器基础》和《中国学科发展战略-微纳机电系统与微纳传感器技术》,参与制定工业级MEMS惯性技术标准2项。
陈建霖,博士,上海大学微电子学院副教授,博士毕业于日本东北大学机器人专业(日本学术振兴会JSPS特别研究员)。他主要从事高精度MEMS惯性器件、微纳器件非线性动力学和MEMS激光雷达等领域的研究,主要应用方向为未来自动驾驶汽车技术以及新一代高灵敏度MEMS传感器。他拥有多年器件设计、制造和测试经验,曾主持日本学术振兴会博士基金,并参与日本国立研究所(NEDO)科研项目、日本学术振兴会基盘研究项目。2023年入选上海市高层次人才引进计划以及主持传感技术联合国家重点实验室的开放课题一项。他在相关领域发表SCI论文8篇,发表EI论文15篇,申请日本发明专利1项,中国发明专利5项。
时广轶,博士,北京大学软件与微电子学院教授,北京大学微米纳米加工技术国家重点实验室博士后,全国惯性技术计量技术委员会委员,无锡北微传感科技有限公司首席技术官(CTO)。2007年毕业于香港中文大学,获自动化与计算机辅助工程专业博士学位。2017年~2019年作为主要起草人制定两项国家标准:《多轴倾角传感器校准规范》、《三维电子罗盘校准规范》。他的主要研究方向为MEMS-SOC设计与实现、MEMS惯性传感芯片,并且在MEMS传感电路设计、MEMS与CMOS工艺兼容、高精度MEMS惯性传感开发等方面拥有丰富经验。
陈君,硕士,一级注册计量师,高级工程师,毕业于南京邮电大学通信与信息系统专业,曾就职于华为技术有限公司上海研究所,2013年进入无锡市计量测试院工作。目前,他担任国家物联网感知装备产业计量测试中心惯性传感器实验室项目主管,主要从事惯性传感器、惯性组件测试工作,具有较丰富的传感器产品测试经验。
七、培训费用和报名咨询
报名咨询:请发送电子邮件至BISainan@MEMSConsulting.com,邮件题目格式为:报名+惯性传感器培训+单位简称+人数。
报名网站:https://www.memstraining.com/training-61.html
培训赞助:请致电联系毕女士(18921125675),或麦姆斯咨询固话(0510-83481111)。
麦姆斯咨询
联系人:毕女士
电话:18921125675
邮箱:BISainan@MEMSConsulting.com
上一篇:第60期“见微知著”培训课程:新兴MEMS传感器和执行器技术
下一篇:最后一页