与皮肤高度集成的可拉伸执行器,用于触觉反馈和闭环人机交互
2023-01-14 19:38:37 来源:麦姆斯咨询 评论:0 点击:
在这项工作中,研究人员报道了一种用于触觉反馈的可拉伸液压放大静电执行器,其可以满足皮肤所需的感知范围、空间分辨率和可拉伸性。得益于装置尺寸的小型化,通过执行器阵列可以构建出足够高的空间分辨率,使其适用于具有最高空间敏感度的皮肤位置。
据麦姆斯咨询报道,近期,来自美国纽约州立大学石溪分校(Stony Brook University)、中国科学院软件研究所以及美国Meta Platforms公司的研究人员共同提出一种用于触觉反馈的可拉伸柔性执行器,可兼容人体皮肤的感知范围、空间分辨率和可拉伸性。基于所研制的柔性执行器和高灵敏度压力传感器,研究人员进一步构建了触觉反馈系统,实现了用户和机器之间的闭环交互。相关研究成果已发表于npj Flexible Electronics期刊。

皮肤集成的可拉伸触觉装置原理图
随着人们对智能机器(如机器人、假肢、计算机、虚拟环境)交互需求的增加,触觉装置正受到越来越多的关注。高性能的人机界面(HMI)对机器人、康复、远程操控、智能制造、娱乐和虚拟现实(VR)/增强现实(AR)等应用场景意义重大。作为用户与机器之间的沟通渠道,有效的人机界面应该是双向、交互式的。现有的大部分机械皮肤触觉装置无法产生与皮肤机械感知能力兼容的触觉反馈,尤其是在力和空间感知方面。此外,人机界面通常在尺寸小型化(例如紧凑、轻薄和灵活)方面存在不足,阻碍了触觉技术在现实环境中的广泛应用。
在这项工作中,研究人员开发了一种可拉伸液压放大静电执行器,可实现低至3mm的高分辨率,满足最敏感皮肤区域(如手指)的两点辨别(2PD)阈值。采用软柱作为压力放大结构,在不增加电压的情况下可大幅增加输出压力,可以产生约500 μm的位移和约1MPa的压力,超出了皮肤触觉感知的阈值。该执行器由柔性材料制成,可拉伸高达15%的应变,且不会损失太多执行器性能。
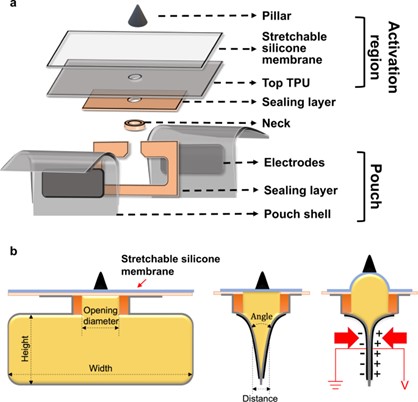
可拉伸液压放大静电执行器示意图
该研究开发的触觉装置可用于在用户和机器之间建立更有效的闭环触觉通信。为了验证其在人机界面中的应用,研究人员进一步制作了基于多孔材料的电阻式压力传感器,构建出一套触觉反馈系统,研究表明,该系统从机器人端捕获的有关表面纹理和物体形状的信息,可通过在皮肤表面产生触觉反馈传递给人类,从而实现双向人机交互。
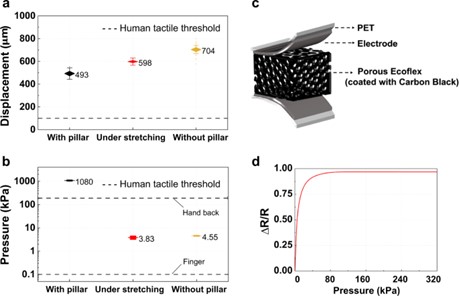
触觉执行器和压力传感器的性能
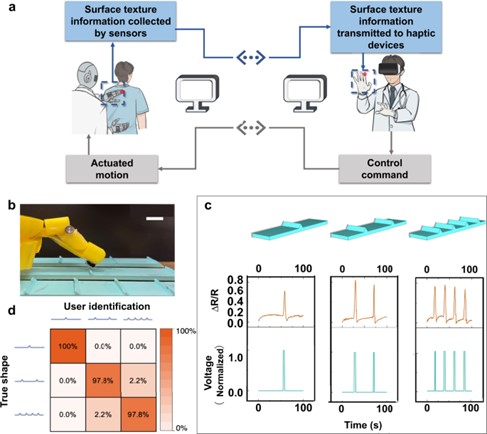
表面纹理识别
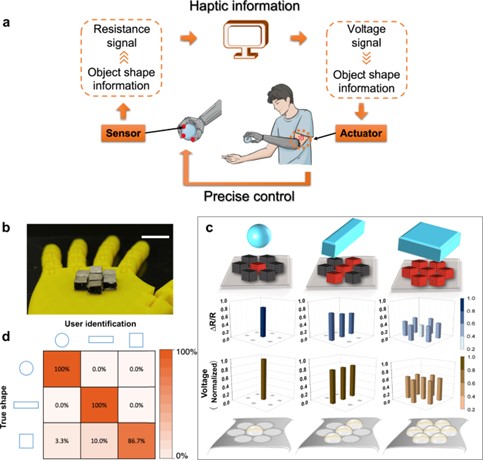
物体形状识别
总而言之,在这项工作中,研究人员报道了一种用于触觉反馈的可拉伸液压放大静电执行器,其可以满足皮肤所需的感知范围、空间分辨率和可拉伸性。得益于装置尺寸的小型化,通过执行器阵列可以构建出足够高的空间分辨率,使其适用于具有最高空间敏感度的皮肤位置。结合所开发的多孔材料高灵敏度压力传感器作为电子皮肤,将压力传感器收集的感觉信息在用户皮肤上再现,实现了闭环人机交互。该柔性触觉装置有望在机器人、假肢、远程医疗、虚拟环境等更广泛的应用领域展现出巨大潜力。
论文链接:https://doi.org/10.1038/s41528-022-00235-y
延伸阅读: