集成在MEMS悬臂梁上的有源光学相控阵
2024-06-09 10:59:31 来源:麦姆斯咨询 评论:0 点击:
研究团队将氮化硅(SiN)光子学和微机电系统(MEMS)技术相结合,展示了有源光子光束操控与压电驱动微悬臂梁的集成。
三维(3D)传感对于机器在复杂动态环境中的运行和交互至关重要。固态光束扫描装置被视为在传感范围、分辨率、刷新率和成本方面实现所需系统技术指标的关键。在硅晶圆上制造的集成光学相控阵(OPA)是一种潜在的解决方案,但目前具有系统级性能的演示装置依赖于昂贵的宽范围可调谐激光器。
据麦姆斯咨询报道,近日,法国格勒诺布尔-阿尔卑斯大学(Univ. Grenoble Alpes)的研究团队将氮化硅(SiN)光子学和微机电系统(MEMS)技术相结合,展示了有源光子光束操控与压电驱动微悬臂梁的集成。光学相控阵在波长为905 nm的情况下工作,可在一个维度上提供17°范围内的输出光束扫描,而整个集成光路的倾角以及输出光束在第二维度上的角度可以使用压电执行器在高达40°的范围内独立调整。集成有源光子学和压电驱动硅MEMS技术的结合实现了单波长二维光束操控,有望为低成本、基于OPA的固态激光雷达(LiDAR)系统奠定基础。上述研究成果以“Active optical phased array integrated within a micro-cantilever”为题发表于Communications Engineering期刊。
图1a显示了集成在MEMS悬臂梁上的OPA的3D示意图。16通道1D-OPA(为清晰起见,仅显示4个通道)设计为在λ = 905 nm下工作,与商用硅基光电探测器技术兼容。输出光栅的间距d为3 µm。OPA光路基于单模氮化硅波导(传播损耗~1 dB/cm),由一个输入光栅耦合器(插入损耗~ 5 dB)波导分路器树构成,该树由4排1 × 2功率分路器(每个分路器插入损耗~ 0.1 dB)构成,将输入光功率均匀分配给16个波导。接着,每个波导中的光相位由热相位调制器(TPM)阵列单独调制。然后,每个光通道由浅(20 nm)蚀刻光栅终止,该光栅将每个波导的光衍射到自由空间。光纤到自由空间的总插入损耗估计约为8 dB。除了在光子芯片的固定部分制造的光和电输入之外,OPA光路的所有上述元件都嵌入可弯曲的弹性悬臂梁中,其厚度约为tCL = 11 µm,宽度约为wCL = 400 µm,长度约为lCL = 2900 µm,如图1b中的俯视图所示。
图1c显示了层结构主要元件的示意横截面。图1d显示了悬臂梁TPM部分的扫描电子显微镜(SEM)横截面图像。该图显示了集成光路的关键元件:SiN波导(以蓝色突出显示)、氮化钛(TiN)线和在相邻波导之间提供热隔离的充气空隙,以及叠加的PZT层。图1e显示了包含已制造器件的完整200 mm晶圆。
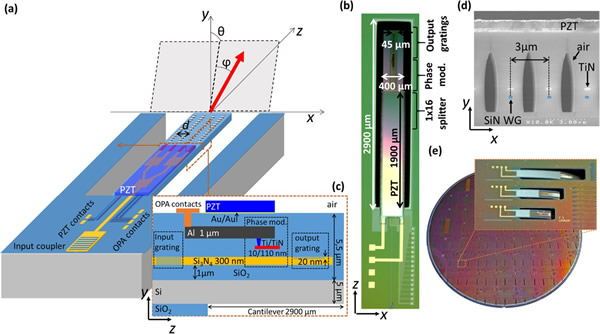
图1 集成在MEMS悬臂上的OPA及其特性
在未向PZT执行器施加电压的情况下,研究人员验证了光子光路的功能。图2a展示了配置 OPA时获得的图像,此时0阶主光束ϕ0的中心位置为ϕ = 0°。测得主光束ϕ的发散角为Δϕ = 1.2°(从图2b中的高斯拟合(蓝线)中提取),接近理论值1.25°。图2c显示了在−10° < ϕ0 < 10°的窗口内以2°为步长校准的主光束的OPA发射强度分布。每条线的颜色对应不同的ϕ0值。
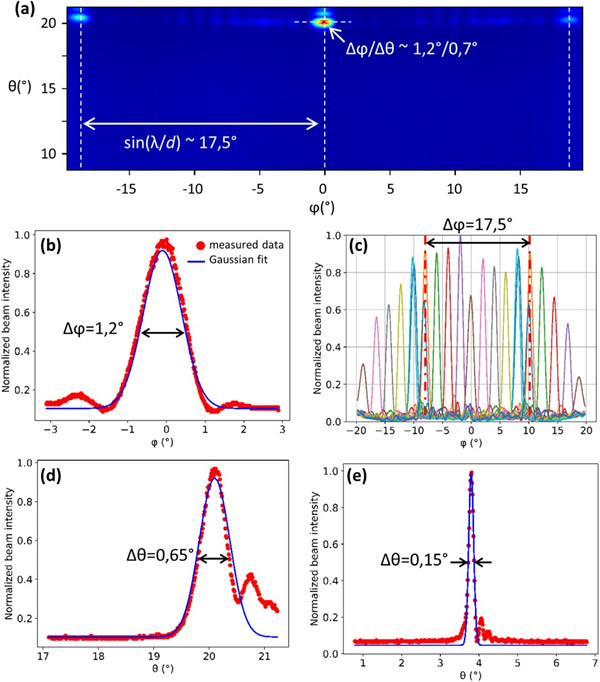
图2 输出光束特性和OPA光束操控
光束在θ方向的强度分布如图2d所示。发射峰值位于相对于晶圆表面法线的θ = 20°处。光束的发散角为Δθ = 0.65°。与放置在固定晶圆表面(而非悬臂梁上)上的相同OPA的θ光束强度分布(图2e)相比,发射角θ = 4°和发散角Δθ = 0.15°均存在明显差异,这两者都大致符合预期的天线行为。
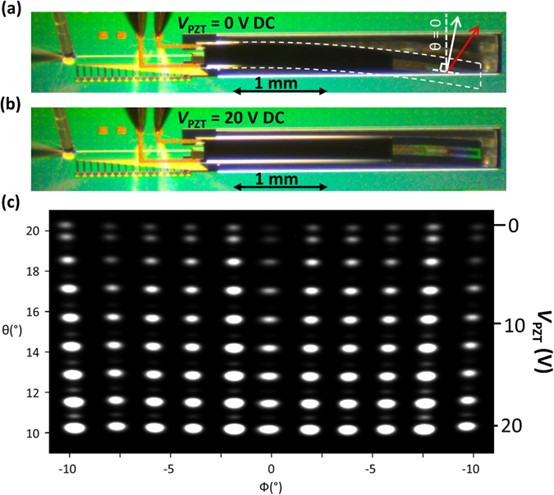
图3 使用准静态悬臂梁模式的2D光束操控
虽然在准静态模式下,所能达到的光束θ值范围受到PZT层介电击穿的限制,但在动态模式下,通过施加正弦电压VPZT(t) = Vmax(1+sin(2πft))/2使悬臂梁进入谐振模式,可获得更大的θ值。图4a显示了对于Vmax = 4 V时,发射角变化幅度Δθ与激励频率f的关系。
当激励频率固定在f0 = 1.52kHz时,可从图4b中看到Δθ随Vmax的变化情况。对于Vmax = 6 V,Δθ ~ 20°,远大于在准静态模式(f = 0 Hz)下观察到的值。在f0下观察到的Δθ最大值接近42°,此时Vmax为16V。通过同步施加到PZT层的正弦电压和施加到OPA电极的电压,研究人员对OPA光束进行了光栅扫描。图4c显示了使用频闪捕捉方法获得的相机图像的合成图像。
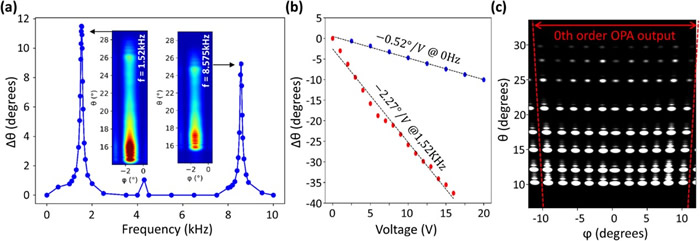
图4 使用谐振悬臂梁模式的2D光束操控
综上所述,通过在压电驱动悬臂梁内集成有源1D-OPA光子集成光路,这项研究演示了单波长连续二维光束操控技术。这种现有硅光子学和MEMS技术的集成完全基于成熟的工业级200 mm硅晶圆加工工艺,保留了基于OPA的单一维度光束操控的所有优势,同时避免了使用宽范围可调谐激光器在第二维度上扫描光束的必要性。单波长工作将简化OPA激光雷达的所有元件,从而显著降低系统复杂性和成本。更普遍地说,将复杂的光子光路集成到基于压电驱动的可移动表面上,为集成传感器设计提供了新型架构的可能性。
论文链接:https://doi.org/10.1038/s44172-024-00224-1
延伸阅读:
上一篇:基于压电纤维的主动降噪织物
下一篇:最后一页