基于聚焦叉指换能器的环形SAW陀螺仪
2024-04-29 21:04:52 来源:麦姆斯咨询 评论:0 点击:
这项研究利用聚焦叉指换能器(FIDT)能够集中SAW能量以提高振动幅值,首次提出并通过实验验证了一种基于驻波模式的环形SAW陀螺仪。
声表面波(SAW)陀螺仪利用一种被称为SAW陀螺效应的现象来测量旋转角速度。由于简化了传统MEMS陀螺仪所需的悬浮振动机制,SAW陀螺仪非常适合在恶劣环境中应用。
据麦姆斯咨询报道,近期,西北工业大学机电学院常洪龙教授团队首次提出了一种使用聚焦叉指换能器(FIDT)的新型环形驻波模式SAW陀螺仪。传统SAW陀螺仪使用线性IDT产生声表面波,会导致波束偏转和能量耗散,而该研究团队使用FIDT根据结构特征集中SAW能量,从而获得更好的聚焦性能和增强的SAW振幅。实验结果表明,该新型SAW陀螺仪的灵敏度为1.51 μV/(°/s),零偏不稳定性为0.77 °/s,与传统SAW陀螺仪相比提高了一个数量级。因此,FIDT组件可以改善SAW陀螺仪的性能,展示了其在角速度测量方面的优越性。这项研究工作为提高SAW陀螺仪的灵敏度等性能提供了新思路。相关研究成果以“A toroidal SAW gyroscope with focused IDTs for sensitivity enhancement”为题发表于Microsystems & Nanoengineering期刊上。
器件设计与仿真
如图1a所示,基于压电效应的SAW陀螺仪主要由FIDT、圆弧反射器、金属柱和溅射在器件表面的电极构成。FIDT是布置在压电材料上的周期性间隔的金属电极,可在交变电场和声波之间提供有效的转换。为了提高驻波产生的效率,研究人员在驱动FIDT的两侧设计了成对的反射器。金属柱被布置在结构的中心,并随着驻波周期性地运动,这类似于MEMS陀螺仪的悬浮基准质量块的功能。外部角速度可通过感应FIDT检测传感方向上的次级SAW信号计算得出。为了更好地揭示驻波的形成原理,研究人员基于商业软件COMSOL建立了SAW陀螺仪驱动结构的有限元模型,仿真结果如图1b所示。
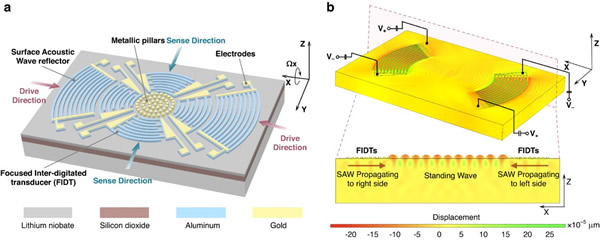
图1 新型环形SAW陀螺仪的工作原理
为了提高SAW陀螺仪的性能,研究人员设计了一种不同于传统线性叉指换能器(LIDT)的驱动结构,即聚焦叉指换能器(FIDT),如图2a所示。在这项工作中,通过沿着SAW传播路径适当地布置金属柱,可有效地提高科里奥利(Coriolis)力,从而增强陀螺效应。如图2b所示,金属柱被布置在驻波的波腹处,并且间距是半波长的整数倍,以最大化振动速度。接着,研究人员对该FIDT进行了表征,结果如图2c-2d所示。
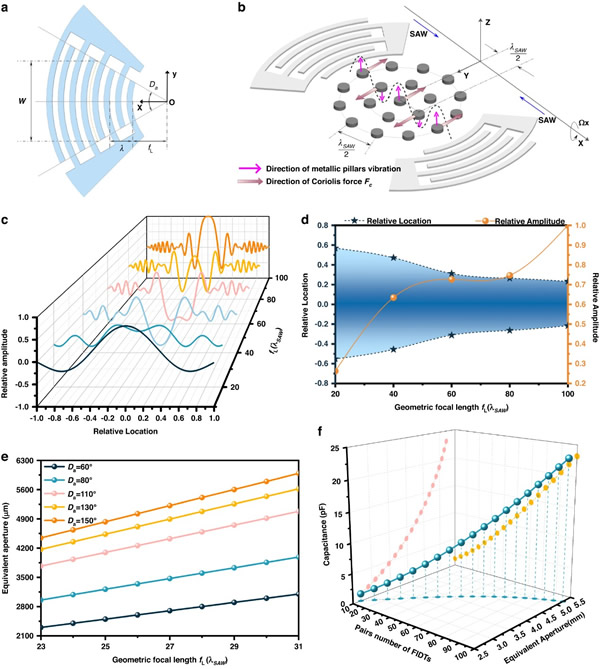
图2 聚焦叉指换能器(FIDT)特性
制造工艺及测量方案
器件结构设计完成后,研究人员采用128° Y切绝缘体上薄膜铌酸锂(LNOI)晶圆,通过MEMS工艺来制造SAW器件。本研究中提出的SAW陀螺仪的详细制造步骤如图3a所示。图3b显示了SAW陀螺仪的显微照片,其中FIDT、SAW反射器和金属柱如图3c和3d所示。
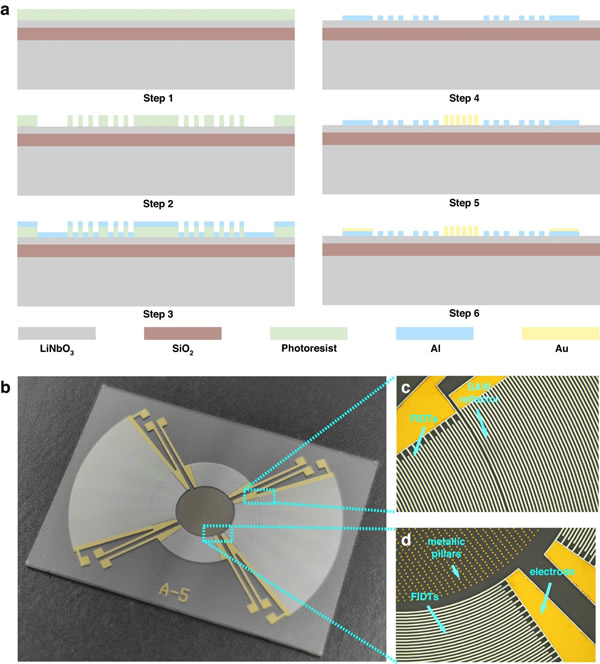
图3 新型环形SAW陀螺仪制造工艺流程
完成环形SAW陀螺仪的制造后,可通过开环测试和闭环测试评估传感器的响应特性。闭环测试示意图如图4a所示。实验设置如图4b所示。SAW陀螺仪芯片被贴装在印刷电路板(PCB)上,其引脚与外部PCB连接,并由树脂盖覆盖。该器件通过丙烯酸板与旋转台连接。通过PCB上的SMA连接器,信号可以传输到外部仪器进行后续测量。旋转台控制器用于向环形SAW陀螺仪提供所需的旋转速度。
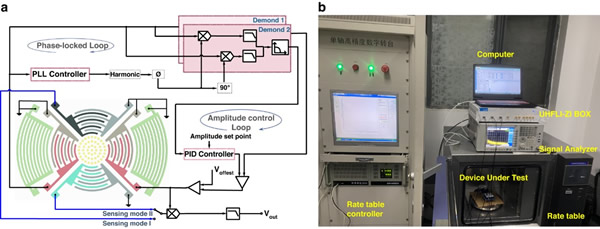
图4 SAW陀螺仪测试实验原理
测试实验结果
采用开环测试方案,可获得不同输入电压下的幅频曲线,如图5a所示。图5b显示了SAW陀螺仪在闭环测试期间的特性。通过使用乘法器对传感方向的信号进行调制,可获得SAW陀螺仪的输出幅值与其旋转角速度之间的关系(图5c)。从图中可以看出,在± 300 °/s范围内,三次测试的灵敏度分别为1.47 μV/(°/s)、1.49 μV/(°/s)和1.59 μV/(°/s)。这些值之间的相对差异可能是由安装的系统误差和传感器的随机误差引起的。该FIDT结构的SAW陀螺仪的灵敏度平均约为1.51 μV/(°/s),比LIDT结构的SAW陀螺仪高出约一个数量级。被测SAW陀螺仪的艾伦(Allen)方差如图5d所示。在静态测试中,以5 Hz的采样速率记录了30分钟的输出信号,SAW陀螺仪的零偏不稳定性为0.77 °/s,比基于LIDT结构的SAW陀螺仪提高了约一个数量级。
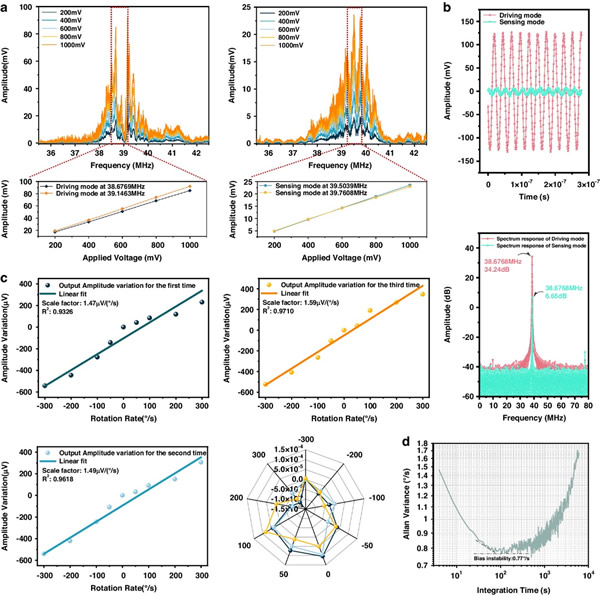
图5 新型环形SAW陀螺仪的性能
综上所述,这项研究利用聚焦叉指换能器(FIDT)能够集中SAW能量以提高振动幅值,首次提出并通过实验验证了一种基于驻波模式的环形SAW陀螺仪。实验结果表明,该FIDT结构的SAW陀螺仪的灵敏度为1.51 μV/(°/s),零偏不稳定性为0.77 °/s。与基于LIDT的SAW陀螺仪相比,本文所提出的环形SAW陀螺仪的灵敏度和零偏不稳定性提高了一个数量级,这说明了FIDT组件的优越性。根据理论分析结果,该FIDT结构的机械灵敏度对其几何参数和环境温度有一定的依赖性,因此可通过优化结构的几何参数或实施温度补偿来进一步提高SAW陀螺仪的灵敏度。本文所提出的SAW陀螺仪采用全固态结构,没有任何悬浮可移动元件,在未来地质勘探和石油钻井等恶劣环境中具有巨大潜力。
论文链接:https://doi.org/10.1038/s41378-024-00658-9
延伸阅读:
《TDK InvenSense惯性测量单元(IMU)IAM-20685产品分析》