灵明光子阐述全球领先的3D堆叠式SPAD dToF图像传感器
2022-02-19 19:15:51 来源:麦姆斯咨询 评论:0 点击:
3D传感正成为智能手机、增强现实和虚拟现实(AR和VR)设备以及智能家居机器人等移动应用中越来越重要的功能。灵明光子介绍了一种3D堆叠式dToF图像传感器,具有240 x 160像素的SPAD阵列、像素级直方图和四分区曝光读出方案。
3D传感正成为智能手机、增强现实/虚拟现实(AR/VR)设备以及智能家居机器人等移动应用中越来越重要的功能。由传感器获得的深度信息可以帮助摄像头更快地聚焦,智能设备更好地理解周围环境,更精确地渲染虚拟对象。在各种深度传感技术中,基于单光子雪崩二极管(SPAD)的直接飞行时间(dToF)技术,其误差在正常工作范围内不随距离变化,受多径干扰影响小,功耗更低,已逐渐成为一种强大的前沿3D传感技术。
通过时间相关单光子计数(TCSPC)方案,可以实现高深度可靠性,降低环境噪声。然而,TCSPC方案需要在SPAD和精确的时间数字转换器(TDC)之间进行大量的连接线。因此,随着像素数量的增加,布线将变得越来越困难。此外,大型SPAD阵列必须对每秒数十亿个单光子事件进行计时和处理,这在芯片面积、像素填充因子、IO带宽和功耗等方面提出了巨大的挑战。
为了解决上述问题,3D堆叠技术提供了一种可行的解决方案。3D堆叠技术允许将传感器芯片的SPAD部分和逻辑电路部分分别在两片晶圆上加工,并通过金属混合键合方式集成为一颗完整的芯片。这样的设计可使得芯片在不增加面积的前提下获得更大的电路面积,允许光子探测器和逻辑电路分别采用最适合的工艺节点,实现更高的SPAD光子检测效率(PDE)、更高的分辨率、更低的功耗以及更好的综合性能。
据麦姆斯咨询介绍,灵明光子是一家致力于用世界领先的单光子探测器技术研发并制造高性能3D传感(dToF)芯片的创新厂商,2021年7月,灵明光子发布了国内首款采用3D堆叠技术的dToF传感芯片ADS3003。
在最新发表的题为“A 240 x 160 3D Stacked SPAD dToF Image Sensor with Rolling Shutter and In Pixel Histogram for Mobile Devices”的论文中, 为了节省硅面积和功耗,包括SPAD探测器在内的图像传感器通常选择卷帘快门方案。在该设计中,所有SPAD共享TDC和SRAM,但一次只启用1/4的SPAD,以减少硅面积、降低功耗。同时,为了从不完整直方图中提取准确的深度信息,提出了一种直方图失真校正(HDC)算法,在9.5 m距离处实现了0.1%的精度。
3D堆叠式dToF图像传感器架构
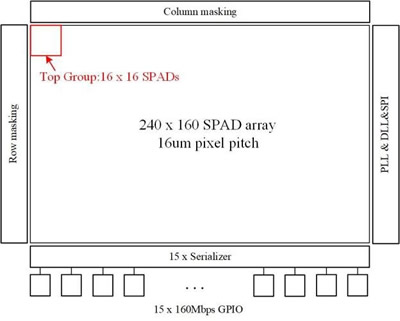
3D堆叠式dToF传感器架构框图。顶层是一个16 μm像素间距的240 x 160 SPAD阵列,阵列的基本单元为16 x 16 SPAD组成的顶组(TG)。

16 x 16 SPAD组成的顶组(TG)示意图,其中每个TG被划分为四个子组(SG),每个SG又被划分为四个宏像素(宏)。一个SG中的SPAD连接到一个TDC,从而使整个阵列共有600个TDC。TG中生成的事件由位于下层中心区域的数字处理器处理。
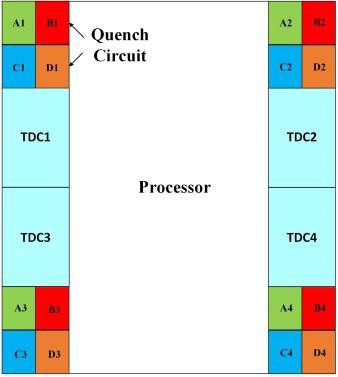
3D堆叠式dToF图像传感器底层电路示意图
一列中的TG通过通用输入/输出(GPIO)进行分组和读取,即10TG/GPIO。为了减少SRAM的使用,一个SG中的所有四个宏共享相同的内存段生成直方图,并且一次只启用一个宏进行曝光。因此,采用卷帘快门方案来构建完整图像,如上图中由四种不同颜色标记所示,即四分区卷帘快门。然而,为了最大限度地提高能效,需要具有相同卷帘方案的受控照明源,这对成像系统提出了额外的挑战。传感器配置通过SPI接口实现。
为了提高闪光(Flash)dToF传感系统在高环境光下的性能,TDC吞吐量至关重要。为了提高读出速度,传感模组采用了Flash TDC和事件驱动(event-driven)读出方案,在检测后立即对光子进行计时并读取数据。
光学模组成像测试

dToF图像传感器采用3D堆叠65 nm/65 nm CMOS工艺制造。为了表征传感器特性,灵明光子设计了一款光学模组。dToF图像传感器作为板上芯片安装在印刷电路板(PCB)上。传感器芯片顶部具有一个视场(FoV)为41°x 63°的2.3 mm物镜(f/1.4)和一个940 nm带通滤光片。在同一PCB上具有一颗峰值功率为15 W、平均功率为90 mW的940 nm垂直腔面发射激光器(VCSEL)作为照明器。通过顶部扩散片,VCSEL可以产生45°x 60°的发散光束。
在曝光阶段,激光脉冲的重复频率为10 MHz,半高全宽(FWHM)为1.5 ns。受泛光照明方法的限制,通常只有25%的光功率能检测到,导致巨大的功率浪费。因此,如果应用四分区卷帘快门照明器,光功率可以降低4倍,且不会影响成像性能。整个模组的尺寸为17 mm x 21 mm x 6 mm,这是目前商用3D成像模组的典型尺寸。
为了进行深度测量实验,将上述模组安装在PCB主板上,利用现场可编程门阵列(FPGA)对dToF图像传感器进行配置和读出。数据通过高速通用串行总线(USB)传输到计算机进行进一步处理。
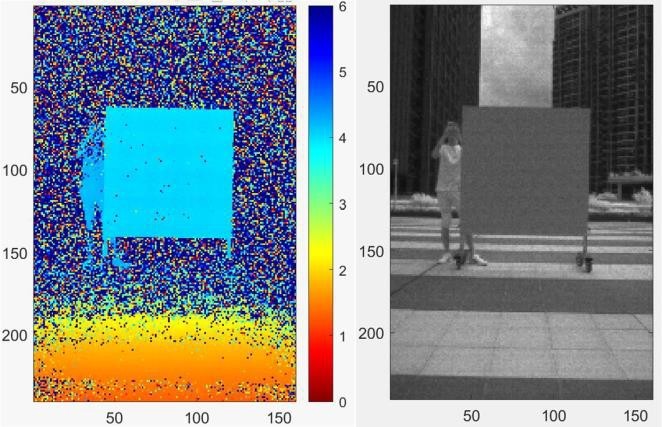
为了展示这种3D堆叠式dToF图像传感器对复杂场景的精确3D成像能力,研究人员在不同距离和传感器配置下拍摄了一系列Flash 3D图像,还提供了同一场景的RGB图像以供参考。
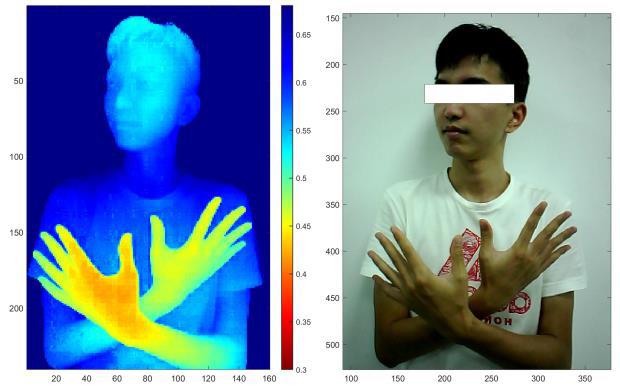
左侧为灵眀光子3D堆叠式dToF图像传感器的人物3D成像,右侧为同一场景的RGB图像。可见3D堆叠传感器对于人脸、手势有着良好的传感质量,并对头发等低反射率物体有着卓越的细节捕捉能力。
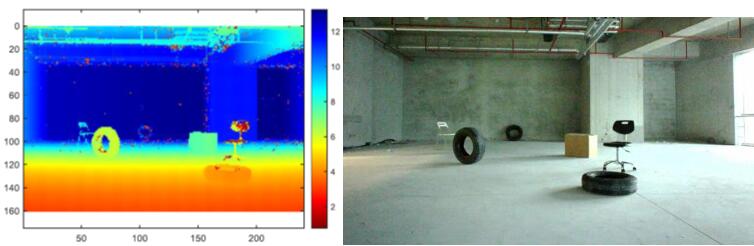
室内场景的3D成像,最远处13 m
室外10 klux日光下4 m处50%反射率板的3D成像
结语
本文介绍了一种用于时间分辨成像的240 x 160像素SPAD dToF图像传感器。得益于3D堆叠技术,这款dToF传感器同时具备了多种原本难以权衡的性能,包括13 m flash检测范围、HQVGA分辨率、0.1%的准确度和精度、10 klux日光下4 m处的3D成像以及306 mW功耗等。证明,3D堆叠是探索SPAD传感器潜力的关键技术。同时,在设计方面,虽然在内存资源和测量精度方面进行了权衡,但通过使用HDC算法,可以从失真的部分直方图中恢复系统精度。因此,凭借上述功能和特性,这种3D堆叠式dToF图像传感器展示了在移动设备等消费类市场的广阔应用前景。
延伸阅读:
《飞行时间(ToF)传感器技术及应用-2020版》
上一篇:欧洲新项目希望为光子学应用“重塑”铌酸锂光学器件
下一篇:最后一页