基于柔性机械超材料的多灵敏度软性触觉传感器
2022-01-01 21:57:36 来源:麦姆斯咨询 评论:0 点击:
近日,澳大利亚研究团队在Scientific Reports期刊上发表了基于柔性机械超材料的多力传感范围的多灵敏度软性触觉传感器的最新论文。该论文中所提出的MST传感器在机器人操纵、人机交互、生物医学工程和健康监测等应用中具有巨大的潜力。
据麦姆斯咨询报道,近日,由澳大利亚墨尔本大学(The University of Melbourne)和澳大利亚研究理事会的电子材料科学卓越中心(Australian Research Council Centre of Excellence for Electromaterials Science)组成的研究团队在Scientific Reports期刊上发表了基于柔性机械超材料(metamaterials)的多力传感范围的多灵敏度软性触觉(Multi-sensitivity Soft Tactile,MST)传感器的最新论文。该论文中所提出的MST传感器在机器人操纵、人机交互、生物医学工程和健康监测等应用中具有巨大的潜力。
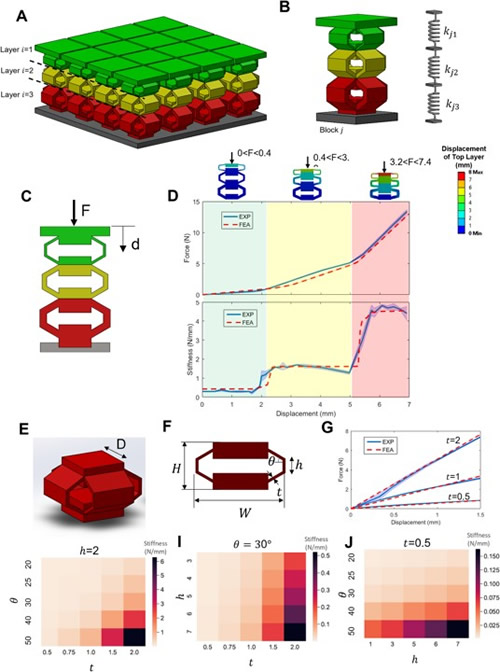
图1 MST传感器力传递介质的机械超材料结构
近年来,软性和柔性触觉传感器因其与人和环境交互中的固有安全性、可穿戴设备的柔性以及在诸如用于灵巧物体操纵的软性机械手、智能假肢和健康监测等应用中的易集成性而受到广泛关注。随着实际应用中不同环境中的交互变得越来越复杂,人们迫切需要能够适应具有不同灵敏度的不同交互作用力的触觉传感器。例如,在集成对象操纵的不同阶段,如触觉物体识别、纹理识别、滑动检测和手部操纵,需要在不同的力传感范围内具有不同灵敏度的触觉传感器。
现有的软性触觉传感器通常仅根据力传递材料的刚度和传感原理(电阻式、电容式、光学式等)提供单个预先确定的力传感灵敏度和动态范围。由于每种传感原理都有其自身的能力限制,因此,灵敏度和传感范围之间的权衡一直是一个固有的问题。通常,这些软性触觉传感器的机械结构是经过仔细校准的,这导致要么在狭窄的力传感范围内具有高灵敏度,或者在较宽的力传感范围内灵敏度较低。
为了扩大力传感范围并将灵敏度保持在可靠水平(同时实现高接触力灵敏度和宽力传感范围),研究人员曾尝试使用基于分层织物的电阻传感器、可填充微结构、基于压力峰值效应的多级微结构或柔性压阻传感器。然而,这些传感器的功能仍然局限于特定的灵敏度和力传感范围,具体取决于材料成分或制造工序。目前还没有一种软性触觉传感器能够产生多个任意的、预定义的灵敏度和力传感范围。
受具有不同刚度的多层的人体皮肤的启发,澳大利亚研究团队在这篇论文中提出了一种异质多层结构和相关的设计框架,以产生一种跨力传感范围的MST传感器。这是通过每层结构刚度可调的多层结构实现的。他们提出的结构可使接触力以不同速率转换为不同层的位移,具体取决于各层的刚度。不同的力-位移速率曲线对应于MST传感器的不同灵敏度。
为了实现具有多个预定义和可调力-位移曲线的结构,研究团队开发了一种柔性/软性机械超材料。该机械超材料是一种架构化结构,其机械性能由其结构而非化学成分定义。 通过对已知材料的结构操纵,改变机械超材料的拓扑结构将产生新的机械性能。机械超材料所需的特性可以通过探索其结构的几何参数所提供的充足的设计空间来实现。不同的结构被用于实现不同的软性传感系统,例如用于可拉伸应变传感器的拉胀结构,用于压力传感的基于晶格的结构,或用于肌电信号检测的基于折纸的结构。
在这篇论文中,作者们提出了一种多层晶胞机械超材料作为软性触觉传感器的力传递结构,通过改变结构的几何参数,为每层所需的刚度创建了一个大型的线性力-位移(刚度)模式库。然后,他们使用一种可以测量各层产生位移的换能方法,该方法可以在不同的力传感范围内以不同的灵敏度测量接触力。在这项研究中,基于磁场的换能方法被用于测量各层的位移信息。测量磁场的变化可提供位移信息,结合各层的机械行为,将提供在灵敏度和力传感范围方面所需的特性。
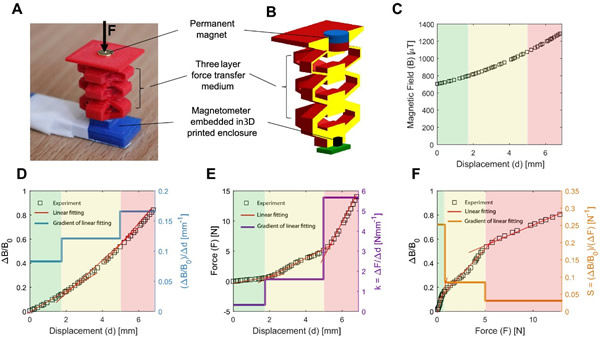
图2 MST传感器的基于磁场的换能方法
研究人员提出了一个系统的设计程序来选择合适的设计参数以产生所需的特性。他们使用广泛可用的台式3D打印机制造了MST传感器结构的两个示例设计,并对其性能进行了测试。结果表明,该MST传感器能够在灵敏度和力传感范围方面提供所需的特性,并且可以在单个结构中实现不同的形状、尺寸和层数。本论文研究中MST传感器的两个示例设计表明其在人类健康监测的可穿戴诊断设备、未来护理机器人和家用机器人等应用中具有巨大的潜力。
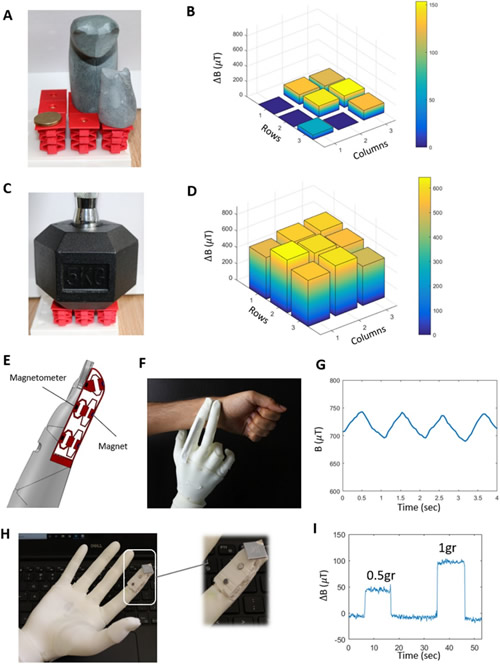
图3 MST传感器的两个示例设计的性能演示
该研究项目由Valma Angliss Trust和墨尔本大学资助。
论文信息:
Mohammadi, A., Tan, Y., Choong, P. et al. Flexible mechanical metamaterials enabling soft tactile sensors with multiple sensitivities at multiple force sensing ranges. Sci Rep 11, 24125 (2021).
https://doi.org/10.1038/s41598-021-03588-y
延伸阅读:
上一篇:可拉伸压力传感器助力柔性机器人实现新突破
下一篇:最后一页