用于多维力感知和自主避障的高灵敏度柔性仿生触须传感器
2024-10-25 17:20:14 来源:麦姆斯咨询 评论:0 点击:
中北大学开发出一种新型柔性仿生触须传感器(FBTS)。该传感器具有高灵敏度、高精度、低检测限等特点,并且能准确识别外部刺激的方向。
仿生触须传感器在避障系统、人机交互以及软体机器人等诸多领域具有重要应用价值。传统的触须传感器多采用刚性衬底结构,难以有效检测来自外部环境的多维力信号,这大大限制了其在复杂环境中的应用前景。
据麦姆斯咨询报道,近期,中北大学侯晓娟教授、何剑教授团队开发出一种新型柔性仿生触须传感器(FBTS)。该传感器具有高灵敏度、高精度、低检测限等特点,并且能准确识别外部刺激的方向。相关研究成果以“A high-sensitivity flexible bionic tentacle sensor for multidimensional force sensing and autonomous obstacle avoidance applications”为题发表在Microsystems & Nanoengineering期刊上。
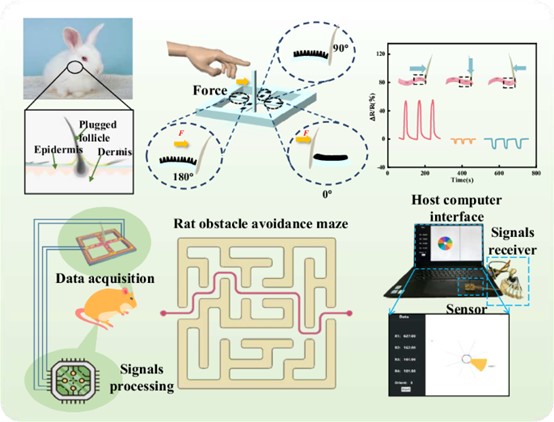
图1 本研究的图文摘要
这项研究提出的柔性仿生触须传感器由柔性腔体衬底、柔性聚酰亚胺(PI)横梁薄膜、多壁碳纳米管(MWCNT)敏感层和仿生触须(尼龙毛)组成。其中,MWCNT采用高剪切分散工艺制备。这种工艺显著提高了界面应力的传递效率,进而提升了传感层的力电耦合效率。因此,柔性仿生触须传感器能够在柔性共形条件下实现微小应变的精准检测。
得益于仿生须状信号放大器和横梁结构的创新设计,柔性仿生触须传感器展现出37.6 N⁻¹的超高灵敏度和2.4 mN的超低检测限。此外,该传感器具备优异的线性度(R² = 0.98)和耐久性(超过5000次循环测试),这得益于高剪切分散工艺提高了传感层的均匀性。柔性仿生触须传感器不仅能够准确识别外部刺激的方向,还能够实现粗糙度识别、风速检测和自主避障等功能。
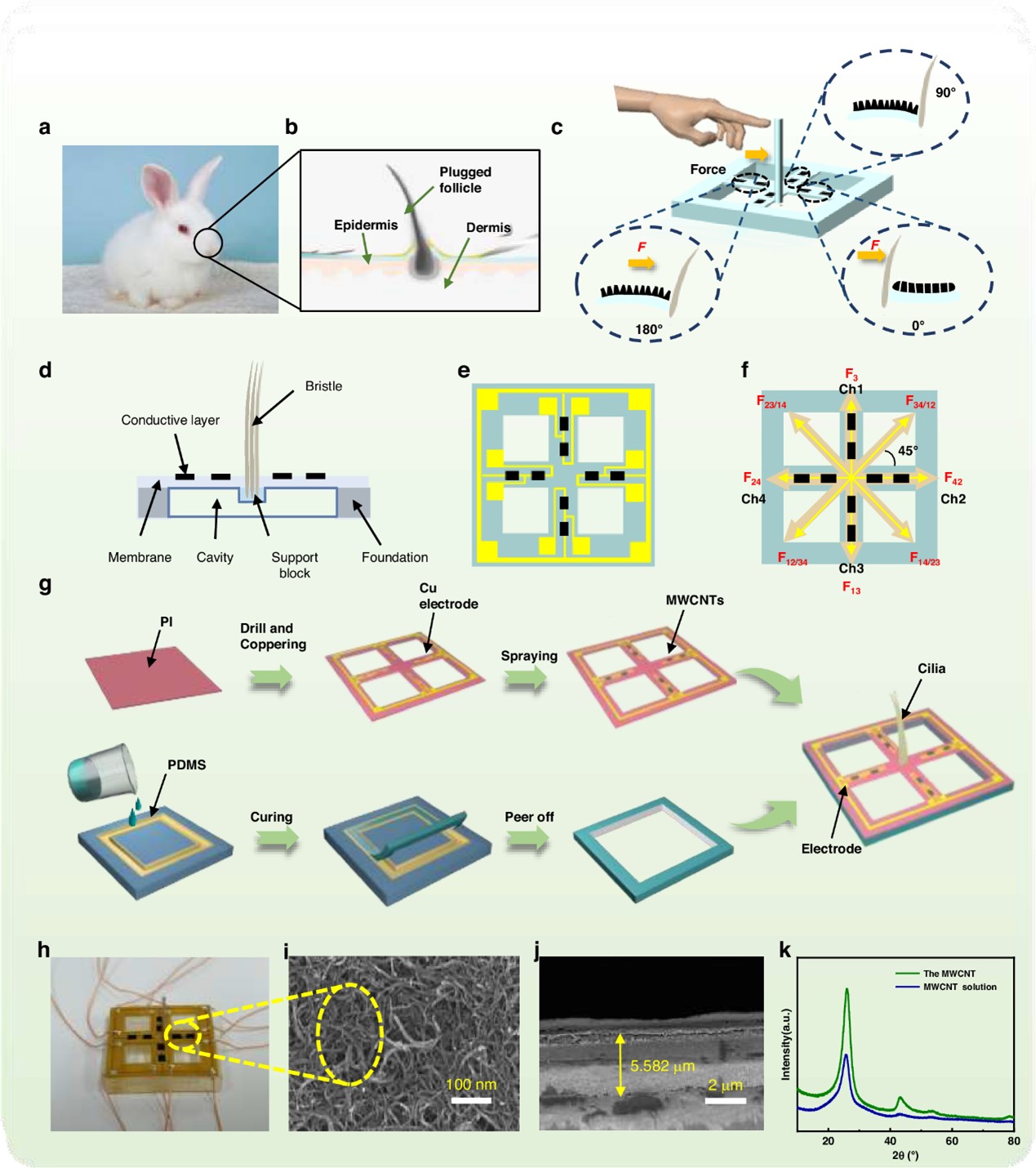
图2 基于横梁结构的柔性仿生触须传感器的工作原理
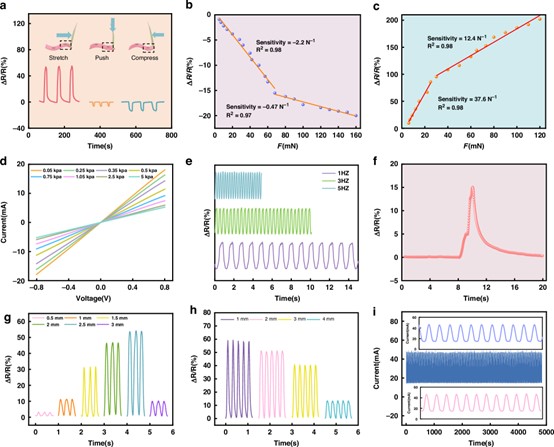
图3 柔性仿生触须传感器的传感性能
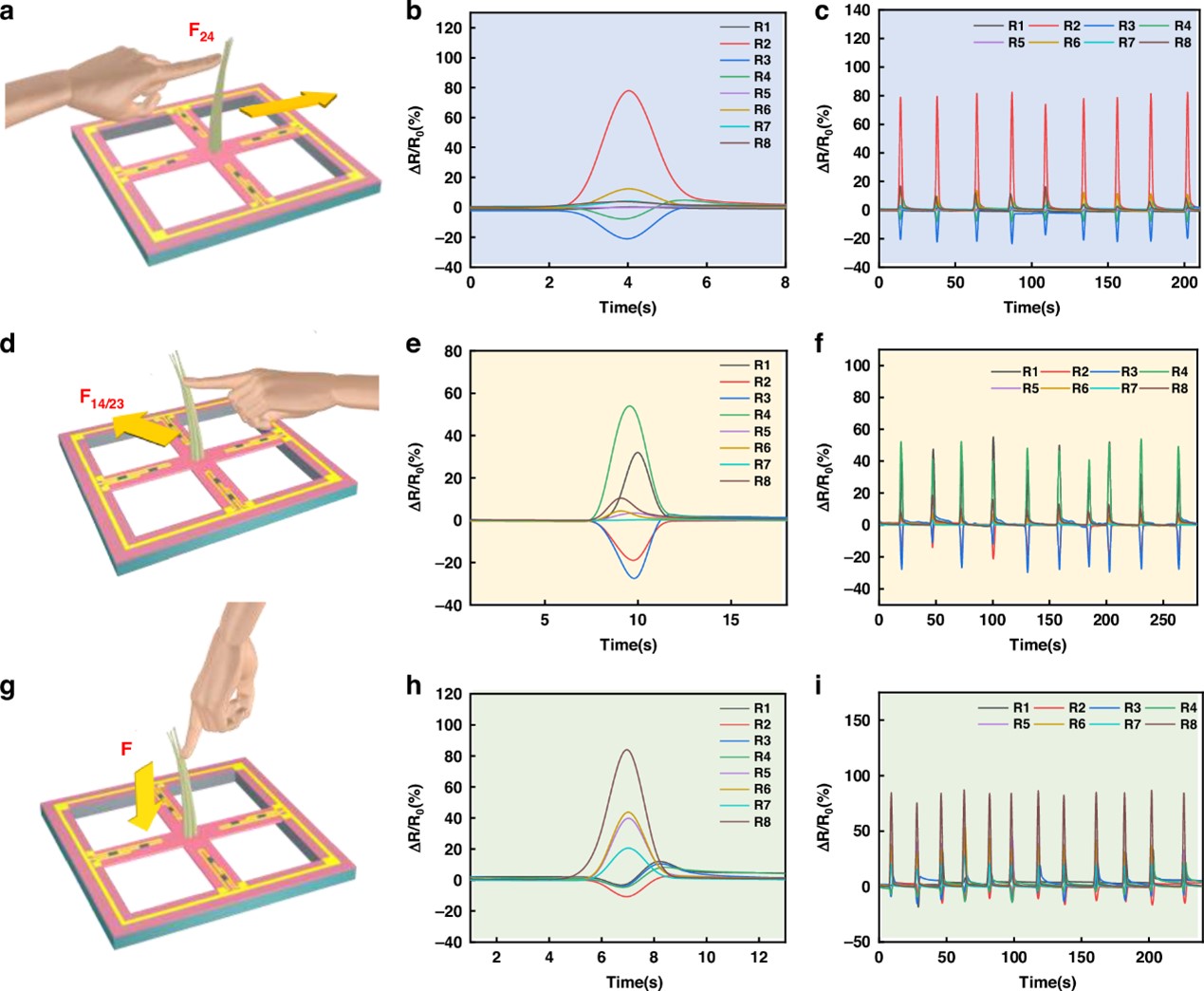
图4 柔性仿生触须传感器的多通道输出对不同机械方向的力的传感性能
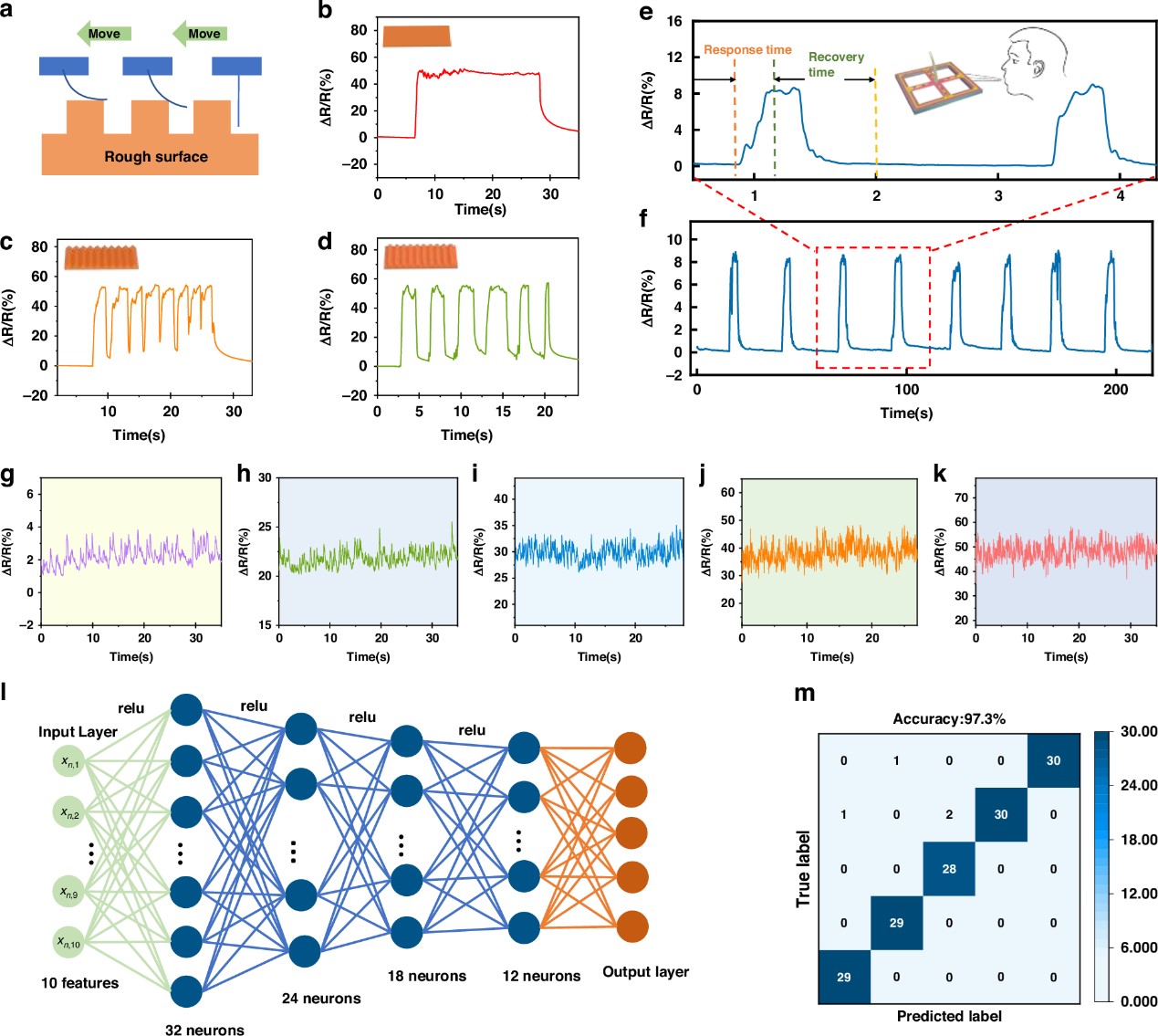
图5 柔性仿生触须传感器对纹理粗糙度和气流的传感性能
在仿生应用方面,研究团队着眼于仿生鼠的空间探测和自主避障能力。通过在仿生鼠头部安装该触须传感器,成功开发出具有自主避障功能的智能仿生鼠。实验表明,搭载该触须传感器的仿生鼠表现出优异的自主避障能力,能够成功完成迷宫穿越任务。
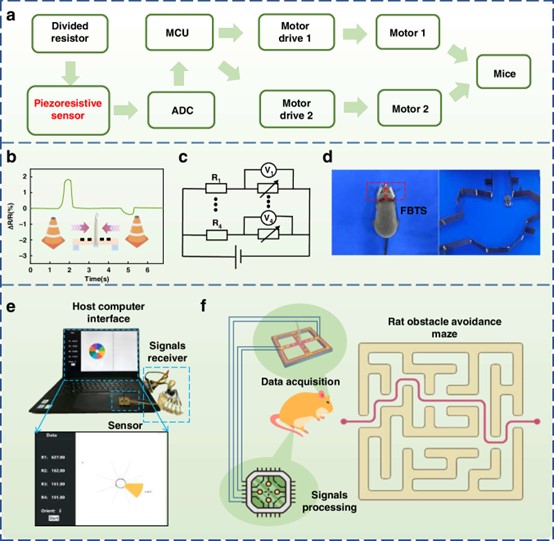
图6 基于触须传感器和传感数据可视化的仿生鼠避障实验
综上所述,这项研究开发的柔性仿生触须传感器不仅具有超高灵敏度、超低检测限、优异线性度和多维力感知优势,还具有出色的耐久性和可重复性。未来,该传感器有望在触觉传感、方向感知和避障等领域展现出广阔的应用前景。
论文信息:https://doi.org/10.1038/s41378-024-00749-7
延伸阅读: