基于激光雷达的3D传感器网络精确监测的新方法
2024-08-14 11:26:26 来源:麦姆斯咨询 评论:0 点击:
芝浦工业大学电气工程和计算机科学研究生院的研究小组开发了一种新方法,用于准确评估基于激光雷达的3D传感器网络中的重要区域。
智慧城市相关技术对于城市的可持续发展至关重要,其通过先进的传感器网络和数字通信系统来管理不断膨胀的城市人口。其中,智慧监控是其关键服务之一,可同时监控城市的室内和室外环境。例如,它可以在交叉路口预测并提醒自动驾驶车辆可能发生的事故,进而提高道路安全性;在室内,它可以在紧急情况下自动通知相关单位,为弱势人群提供支持。
摄像头和激光雷达(LiDAR)传感器常用于智慧监控。激光雷达传感器可提供无色彩的三维(3D)视觉信息。由于激光雷达依赖主动发射激光的反射信息,因此在物体后方存在盲点,难以探测所有需要监控的区域。要解决这个问题,可以在不同的位置安装多个激光雷达传感器以组成3D传感器网络,增加每帧可获取的点云数。
然而,这也带来了另一个问题,激光雷达传感器网络的带宽有限,无法支持实时传输所有增加的点云数据。以往的研究提出了一种数据选择方法,只将3D空间中重要区域的数据传输到服务器。然而,这些研究并未详细说明如何在点云中准确定义并评估所谓的重要区域。
为了弥补这一空白,芝浦工业大学电气工程和计算机科学研究生院的研究小组开发了一种新方法,用于准确评估3D传感器网络中的重要区域。
“在这项研究中,我们基于多种空间指标构建的空间特征来评估重要区域。重要区域取决于任务。例如,在检测事故易发点时,重要区域是人和车辆等移动物体可能存在的空间。我们的方法能准确识别这些区域。”研究人员解释说。
该研究小组成员包括芝浦工业大学的Ryoichi Shinkuma教授、NEC公司安全系统平台研究实验室的Koichi Nihei和Takanori Iwai。他们已将该研究成果发表于IEEE Sensor Journal。
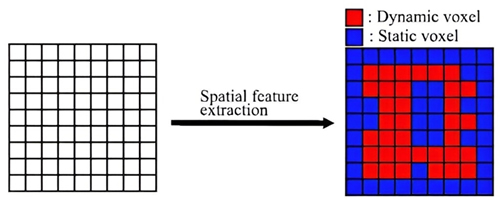
研究人员将点云划分成被称为“体素”的小区域,其中,重要区域被分为动态体素,代表人员会经过的区域。其他区域被分为静态体素,包括墙壁和房顶等人员不会通过的区域。
为了准确评估这些重要区域,有必要使用多种空间度量来创建空间特征(SF)。为此,研究人员使用了两种空间度量来创建空间特征,包括时间度量和统计度量。时间度量基于激光雷达传感器获取的点云数随时间的长期变化,而统计度量则表示每帧点云数的差异。
研究小组通过实验进一步评估了使用这些指标评估重要区域的准确性。他们试验了多个激光雷达传感器在室内运动场景中获取的点云数据,发现与单独使用其中一个指标相比,使用两个指标识别动态体素的准确率可提高10%。
此外,他们还利用机器学习来确定阈值的最佳组合,这些阈值用于利用上述两个指标对动态体素进行分类。结果显示,使用这些阈值获得的准确度与实验中使用的最优值相当。他们还确定,将体素的大小从1米增加到1.25米会降低准确度。
研究结果凸显了使用多种指标准确评估重要区域的实用性。这项研究有望显著提高自动驾驶系统的安全性和效率。对于送货机器人来说,识别碰撞或拥堵风险高的地点,有助于规划高效的送货路线,减少时间和成本。这也有助于解决物流业劳动力短缺的问题。
总之,这项创新方法有望使智慧城市更加安全、高效。
论文信息:DOI: 10.1109/JSEN.2023.3247302
延伸阅读:
上一篇:集成仿生超构透镜阵列的定向3D激光雷达
下一篇:最后一页