受弱电鱼启发的电子皮肤,用于主动非接触式3D追踪与传感
2024-11-23 16:10:29 来源:麦姆斯咨询 评论:0 点击:
该电子皮肤能够以非接触方式主动确定目标物体的3D位置,并将位置信息实时无线传输给其它设备。它还能够与机器轻松交互,例如在虚拟或真实3D空间中操作虚拟物体、控制机械臂和无人机。
近年来,随着机器人技术与虚拟现实/增强现实(VR/AR)的快速发展,各个应用领域对具备非接触式精确3D感知能力的轻型便携式传感器需求日益增长,尤其是在实现沉浸式3D场景方面。柔性电子技术的进步使得轻薄柔性的电子皮肤(E-skin)得以实现,这种皮肤能够最大限度地与人体皮肤或机器人贴合,实现共形集成。这一重大进展不仅为电子皮肤实现基于触觉感知/反馈的人机界面(HMI)开辟了新的可能性,也为心电图(ECG)、汗液和其它生理信号的持续健康监测提供了新途径。
据麦姆斯咨询报道,近期,香港城市大学于欣格副教授团队受弱电鱼(Mormyroidea)主动电感知能力的启发,开发出一种具备非接触式3D感知能力的透明、轻薄、柔性电子皮肤。该电子皮肤能够以非接触方式主动确定目标物体的3D位置,并将位置信息实时无线传输给其它设备。它还能够与机器轻松交互,例如在虚拟或真实3D空间中操作虚拟物体、控制机械臂和无人机。此外,它还可以与机器人集成,为机器人提供3D态势感知能力,使其能够感知周围环境、避开障碍物或追踪目标。相关研究成果以“Mormyroidea-inspired electronic skin for active non-contact three-dimensional tracking and sensing”为题发表在Nature Communications期刊上。
在自然界中,许多动物的皮肤都具有令人惊叹的能力。Mormyroidea这种弱电鱼能够利用自身电场主动探测猎物,通过皮肤感知周围环境,并对猎物进行3D定位,即使猎物藏在淤泥下也能被发现。在这项研究工作中,受弱电鱼主动感知系统的启发,研究团队开发了一类用于非接触式3D感知的无线柔性透明电子皮肤的材料、器件、电子学和集成策略,其由类似弱电鱼的传感器和系统级柔性电子模块组成。在聚二甲基硅氧烷(PDMS)基底上印刷的两个图案化生物凝胶电极以及控制电路分别用于模拟弱电鱼的发电器官和电感受器。这种传感器无需物理接触即可主动探测目标物体与传感器之间的距离。通过对材料和设计进行优化,该传感器实现了柔韧、超薄、可拉伸和透明等特性。
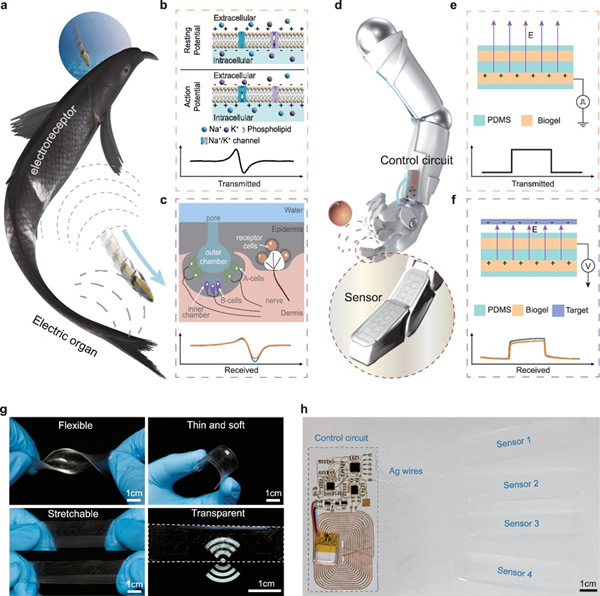
图1 本研究提出的仿生透明电子皮肤
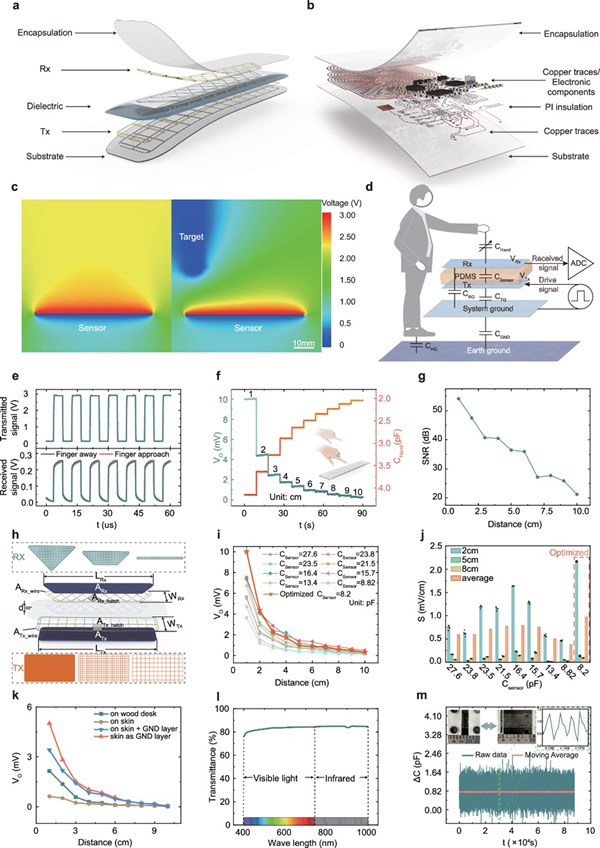
图2 电子皮肤的特性
研究团队通过将多个传感器和定位算法集成到柔性电子模块中,使该电子皮肤系统具备了在3D空间中精确定位目标的能力。进一步地,研究团队展示了多项非接触人机界面和机器人感知应用。经验证,该电子皮肤系统具有高灵敏度(在1 cm处的距离分辨率为5 μm),可拉伸度高达172%且性能稳定,在可见光范围内具有优异的透明度(超过80%)。采用杨氏模量与人体皮肤相近的PDMS和生物凝胶材料,确保了器件的舒适性和柔韧性,使其贴身穿戴时柔软舒适,能随皮肤自然伸展。选用生物凝胶作为电极不仅实现了与金属电极相当的响应性能,还具有更优的信噪比和拉伸性能。此外,PDMS和生物凝胶的高透明度使电子皮肤能够为标准屏幕添加3D感知功能,并在机器感知应用中与红外测距传感器集成,从而有效提升近距离感知分辨率。
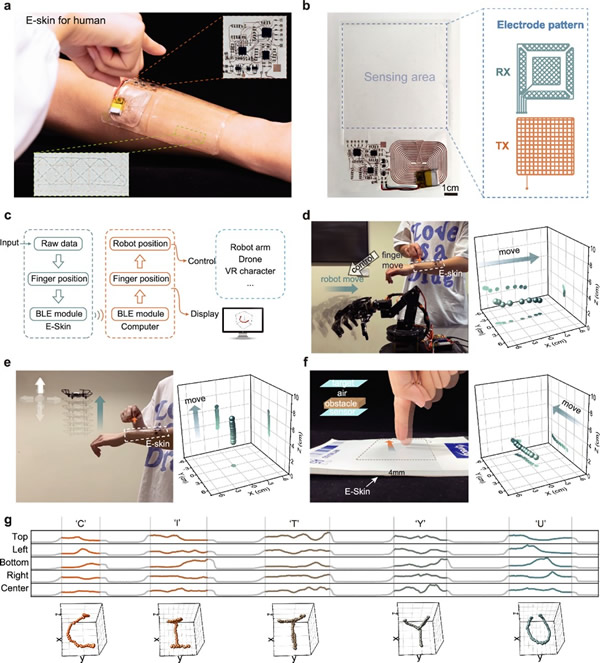
图3 电子皮肤系统用于非接触式人机界面
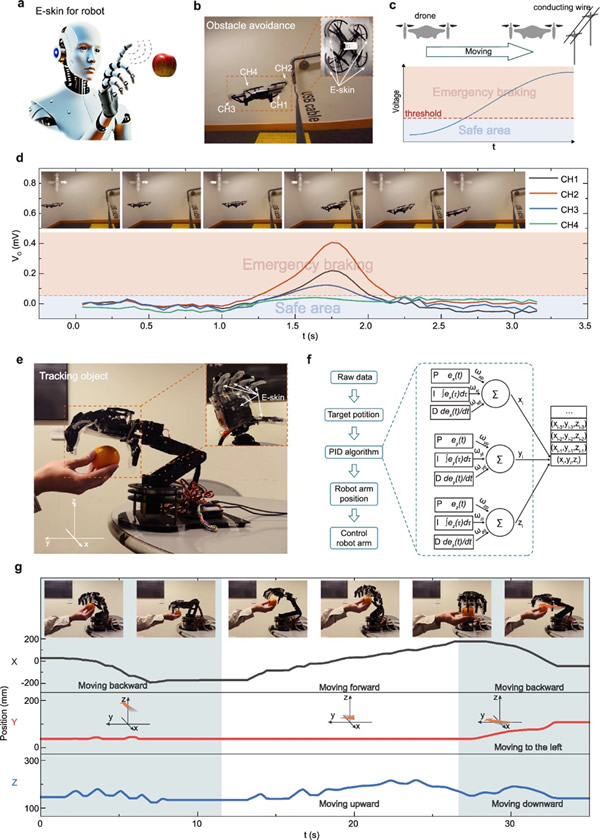
图4 电子皮肤系统用于机器人传感
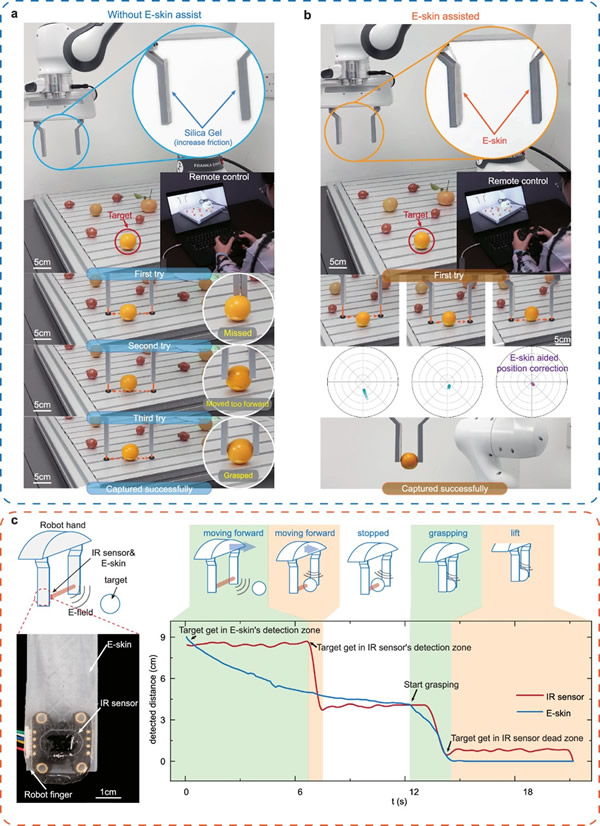
图5 电子皮肤系统用于机械臂抓取目标物体
综上所述,这项研究提出了一种受弱电鱼主动感知系统启发的新型无线、柔性、透明电子皮肤,它能够实现非接触式精确3D运动检测。这种电子皮肤可以替代传统的橡胶基机器人皮肤,提供保护、增加抓握摩擦力以及对环境的高灵敏感知,可用于无人机紧急避障和机器人手自动追踪目标物体等场景。此外,该电子皮肤固有的透明性使其可弥补红外测距传感器在空间分辨率方面的不足,提升整体系统性能。研究团队表示,接下来还需要在扩展功能方面进一步研究,例如实现多指检测等。未来,这种电子皮肤有望在机器人技术、VR/AR和医疗应用等领域展现广阔的应用前景。
论文信息:https://doi.org/10.1038/s41467-024-54249-3
延伸阅读: